Shooting and Digitizing pictures
These are the original photos used.
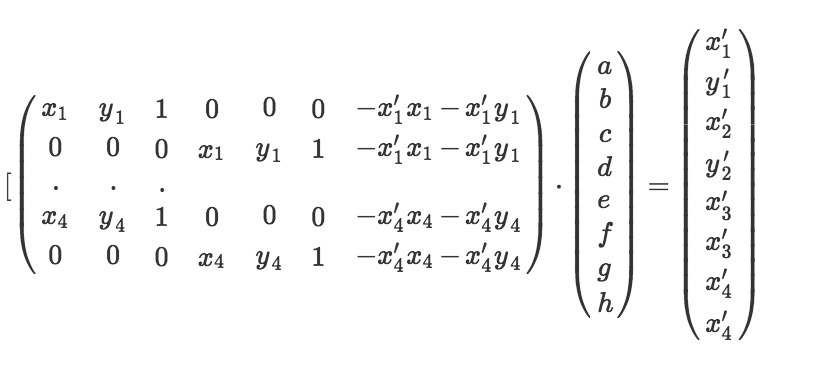
Recovering homographies
This part was pretty straightforward. I filled in the below matrix by taking 4 source and target points from
each image (or desired geometry for the target points), and solved for the matrix (H) by using least squares.
Warp and Rectification
This part simply involved determining the size of the output image by multiplying the corners of the input by H. I then went through each pixel of the output and filled it by tranforming it with
the inverse of H to find the corresponding pixel from the input. Results below

|
 Rectified to the plane of the TV
Rectified to the plane of the TV
|
|
 Rectified to the plane of one of the windows of Moffitt
Rectified to the plane of one of the windows of Moffitt
|
 Warping to a random quadrilateral
Warping to a random quadrilateral
|
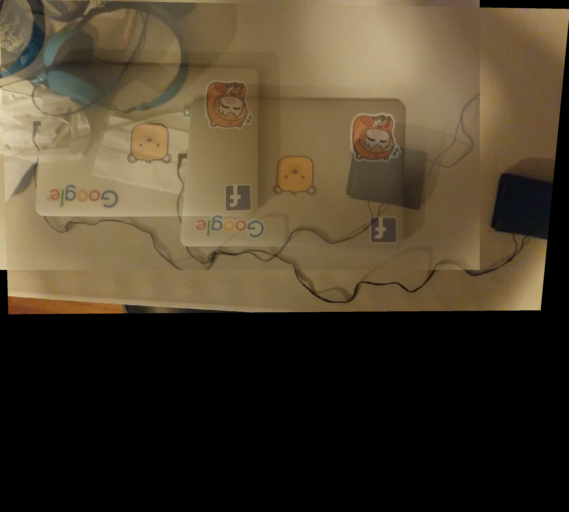
Image Mosaics
This part works the same way except I averaged the inputs for cases where an output pixel mapped to both input images. I suspect my
code is a little buggy since the results aren't great.
<
What I learned
You can project images to a 3D space and bring them back to 2D again, which is pretty mind blowing.