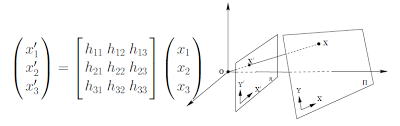
$\begin{bmatrix}
a & b & c \\
d & e & f \\
g & h & 1
\end{bmatrix}
\begin{bmatrix}
x \\
y \\
1
\end{bmatrix}
=
\begin{bmatrix}
wx' \\
wy' \\
w
\end{bmatrix}$
$\begin{bmatrix}
x & y & 1 & 0 & 0 & 0 & -xx' & -yx' \\
0 & 0 & 0& x& y & 1 & -xy'& -yy'
\end{bmatrix}
\begin{bmatrix}
a \\
b \\
c\\
d\\
e\\
f\\
g\\
h
\end{bmatrix}
=
\begin{bmatrix}
x' \\
y'
\end{bmatrix}$