Overview
The goal of the project is to implement a cool application of image warping — image mosaicing. By rotating
the camera about the center of lens without shifting and taking two or more photographs with slightly overlapping
fields of view, we can create an image mosaic by registering, projective warping, resampling and compositing them.
I learned about how to compute homographies and how to use them to warp images and create the panorama.
Part A
Recovering Homographies
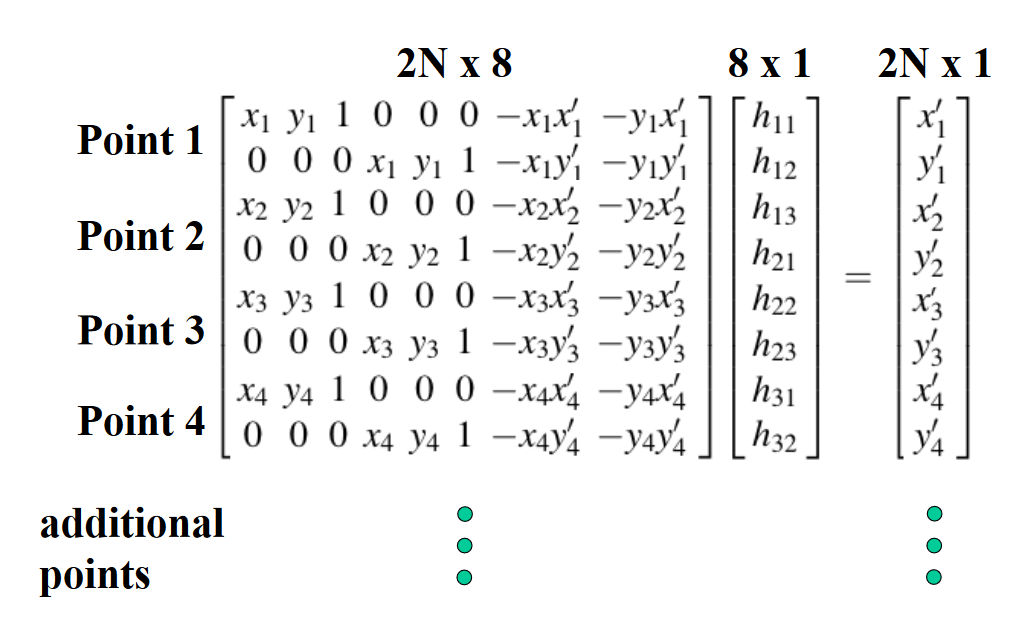
The homography transformation has the following form where H is a 3x3 matrix with the last element i = 1 and
8 degrees of freedom.
To recover the homography, it can be shown from algebra that the homography can be solved be solving the following
linear equation, where the vector h includes the 8 elements and can be reshaped to our homography matrix.
 Robert Collins, CSE486, Penn State
Robert Collins, CSE486, Penn State
|
Image Rectification
One of the application of homography is image rectification. I chose four corners of the input image and
forcing them to be parallel in the new image by selecting the corresponding position of the four corners
in the new image. After that, I can compute the homography and warp the original image to the new rectified
image. The following are examples of image rectification.
 vitamin.jpg
vitamin.jpg
|
 piano.jpg
piano.jpg
|
 fridge.jpg
fridge.jpg
|
 rectified vitamin
rectified vitamin
|
 rectified piano
rectified piano
|
 rectified fridge
rectified fridge
|
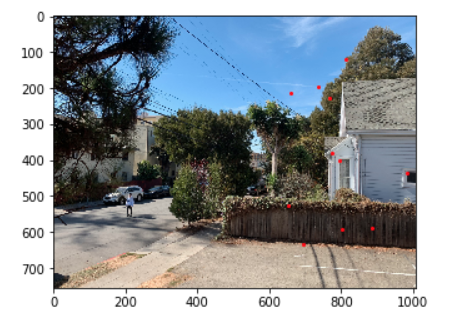
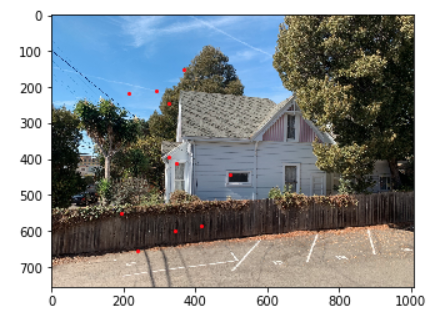
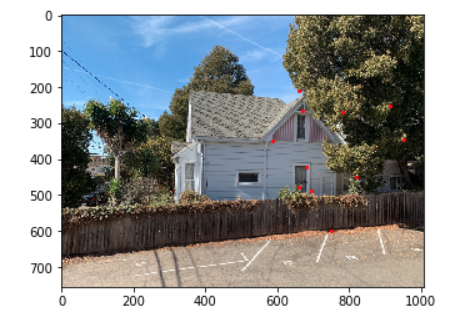
Mosaics
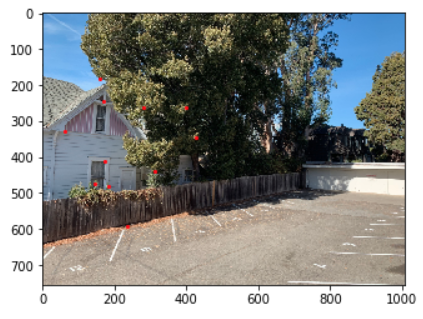
Finally for image mosaics, we can take two or more photographs of the same scene with slightly overlapping
field of views by rotating the camera about the center of lens without shifting. To achieve the goal, I
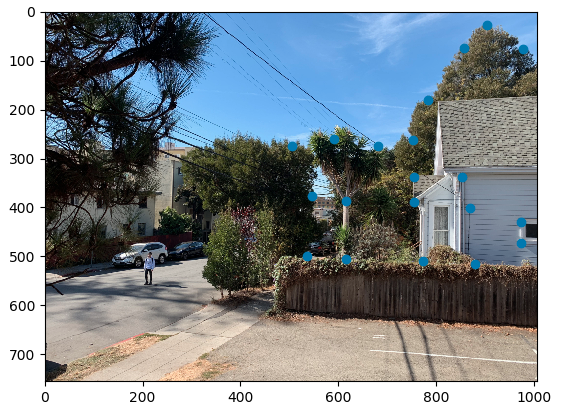
selected 15 corresponding points between each of the two images and created a blank background with the center
image in the middle of the background.
 img1_points
img1_points
|
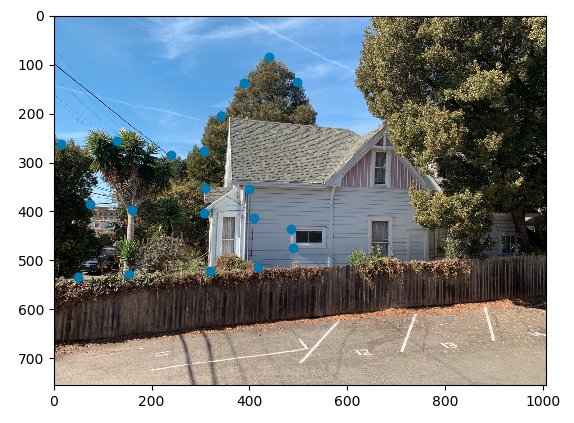 img2_points_1
img2_points_1
|
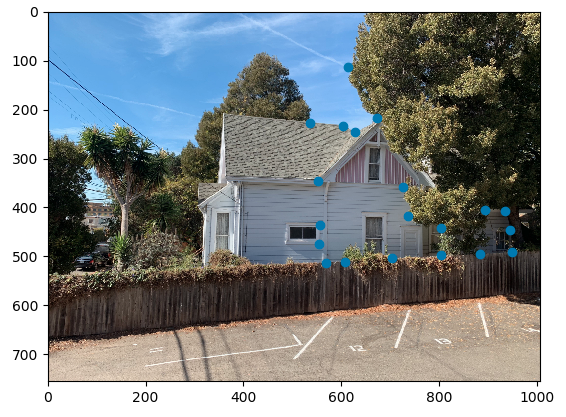 img2_points_2
img2_points_2
|
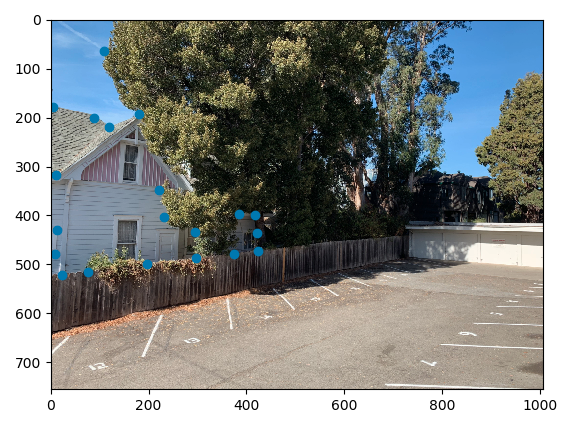 img3_points
img3_points
|
Then, I compute the homography transformation of the left image so that its corresponding points
can be matched with the points in the center image. Finally, I find the overlapping area between the
two images and created a linear mask to blend the two images together to produce the mosaics.
 Warped image 1
Warped image 1
|
 background with image 2
background with image 2
|
 Linear Mask
Linear Mask
|
 Combined Image
Combined Image
|
The following are three examples using the techniques mentioned above to create image mosaics.
Example 1
 original image 1
original image 1
|
 original image 2
original image 2
|
 original image 3
original image 3
|
|
warped image 1
|
 warped image 3
warped image 3
|
 complete mosaic
complete mosaic
|
 cropped mosaic
cropped mosaic
|
Example 2
 original image 1
original image 1
|
 original image 2
original image 2
|
 warped image 1
warped image 1
|
 complete mosaic
complete mosaic
|
 cropped mosaic
cropped mosaic
|
Example 3
 original image 1
original image 1
|
 original image 2
original image 2
|
 warped image 1
warped image 1
|
 complete mosaic
complete mosaic
|
 cropped mosaic
cropped mosaic
|
Conclusion
The lesson I’ve Iearned from the project is that linear algebra is powerful in solving the transformation
matrix and creating different effects of manipulating images. I’ve also noticed the difficulty when manually
selecting the correspondence between images and I’m excited for the next part of the project for automatic alignment.
Part B
In the second part of the project, I created a system for automatically stitching images into a mosaic. The whole
process includes detecting corner features in the image, extracting a feature descriptor for each feature point,
matching these feature descriptors between two images, using a robust method (RANSAC) to compute a homography and
finally proceed as in previous part of the project to produce the mosaic.
Harris Corners
I first start with Harris Corner Detector to detect corners in an image in order to extract features of the image.
I applied Harris Corner Detector which finds corners in an image or where gradient in both x and y direction are both
larger. Here are the results of Harris corners detected for the image.
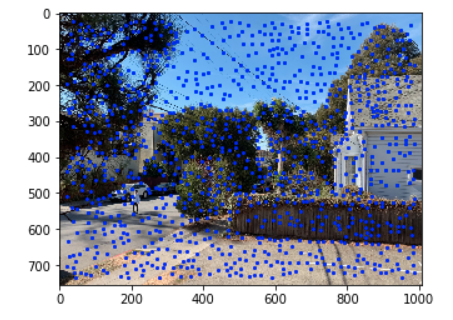 image 1 harris corner
image 1 harris corner
|
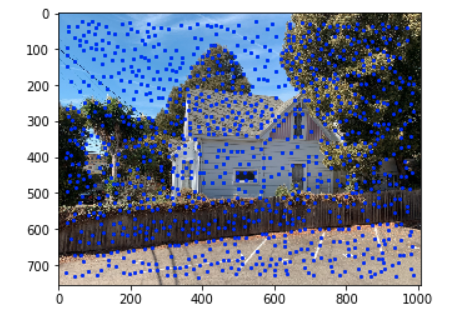 image 2 harris corner
image 2 harris corner
|
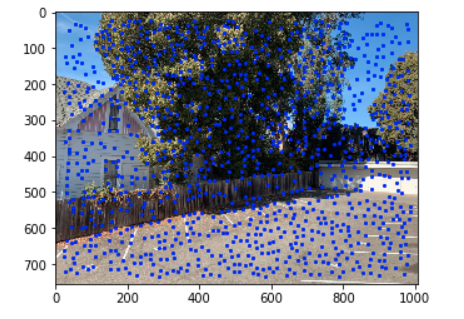 image 3 harris corner
image 3 harris corner
|
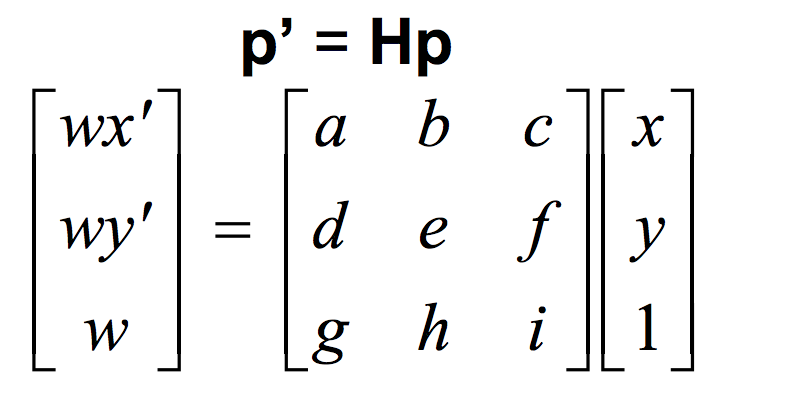
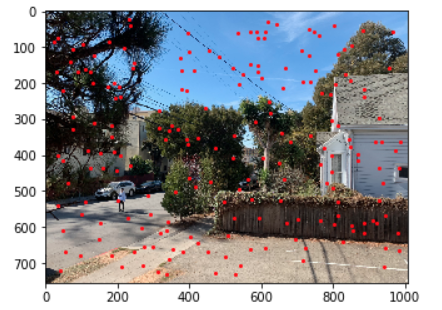
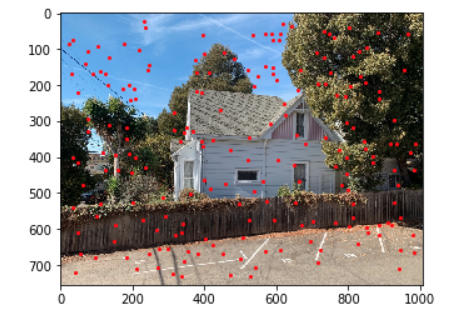
Adaptive Non-Maximal Suppression
As we can see, Harris Corner Detector find too many points for each image . To restrict the number of interest
points in each image, I implemented the adaptive non-maximal suppression algorithm to keep a subset of point that
are evenly distributed on the canvas.
For each Harris corner, I find the compute the minimum radius to the next corner such that the corner strength for
the new point is larger than the corner strength of the original point multiplied by 0.9. I took 200 points with
the largest minimum radius and here are the results of 200 points selected after adaptive non-maximal suppression for each image.
Feature Descriptor Extraction and Feature Matching
For each pass corner left after Adaptive Non-Maximal Suppression, I extract a 40x40 patch centered at the Harris corner.
Then, I applied a Gaussian filter and downsample it to 8x8 patch to eliminate high frequency details. After that I computed
the SSD as the distance between two patches, which is the squared norm of the difference of two patches. I use the ratio of
distance to the first nearest neighbor and distance to the second nearest height, 1-nn/2-nn as matching score and consider
two patch to match if the score is above threshold of 0.5.
Random Sample Consensus (RANSAC)
The feature matching still results in several errors. In order to improve this, I implemented the RANSAC algorithm.
At each iteration, I selected four pairs of feature points at random and compute the homography. Then I applied the
homograph to all points and compute the inliers where the SSD is less than ε(2 in my case). After that, I kept the
largest set of inliers and recompute the SSD error between them and the real matching points. I ran 1000 iterations
and keep the homography where there are maximum number of inliers. Here are some matching results after RANSAC.
 auto detected matching for img1
auto detected matching for img1
|
 auto detected matching for img2
auto detected matching for img2
|
 auto detected matching for img2
auto detected matching for img2
|
 auto detected matching for img3
auto detected matching for img3
|
Comparing the results
After getting the correspondence between images, we can use the same method in part A to warp images to mosaics.
Here are the results of comparing automatic and manual image alignment.
|
Manual Alignment
|
 Auto Alignment
Auto Alignment
|
|
Manual Alignment
|
 Auto Alignment
Auto Alignment
|
|
Manual Alignment
|
 Auto Alignment
Auto Alignment
|
What I Learned
The most interesting part I’ve learned from the project is the process of feature extraction and matching. I’m also
surprised to see so many cool applications of homography and how simple ideas like Euclidean distance, randomness can
be used together for our implementation of the cool mosaics application.