Hall
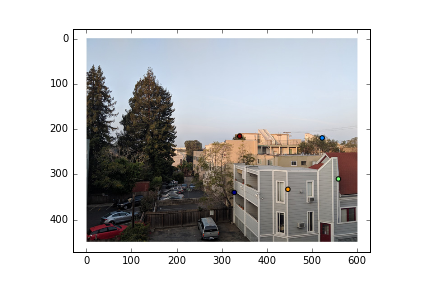
Original Images


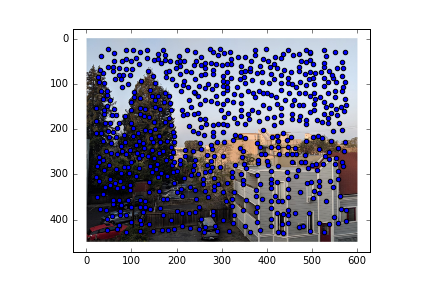
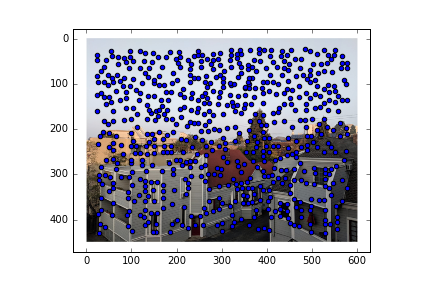
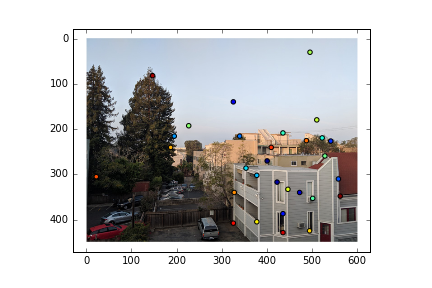
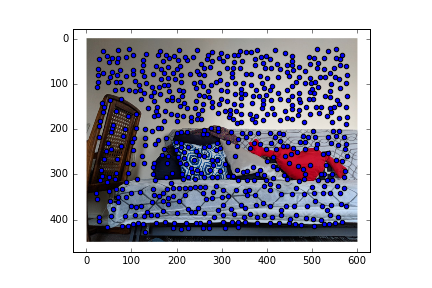
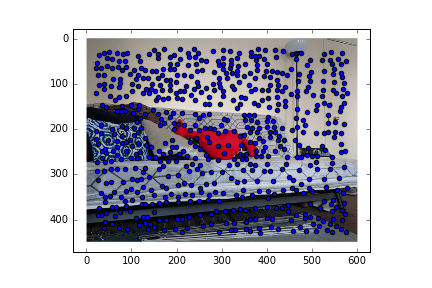
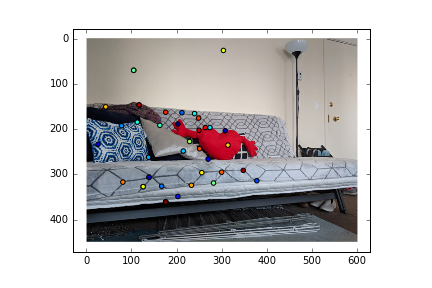
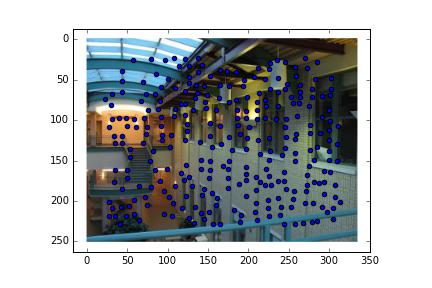
Harris Interest Points
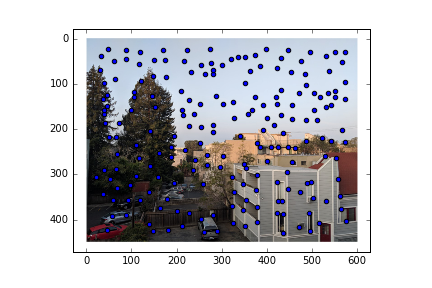
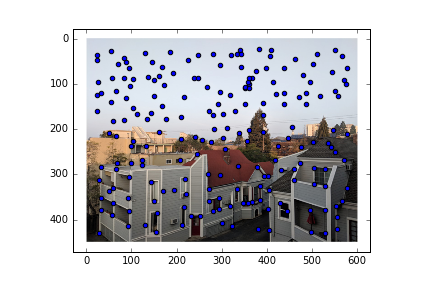
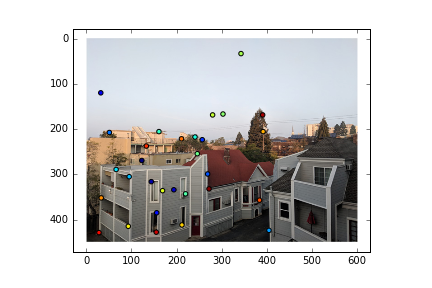
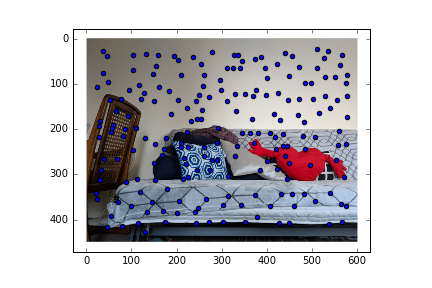
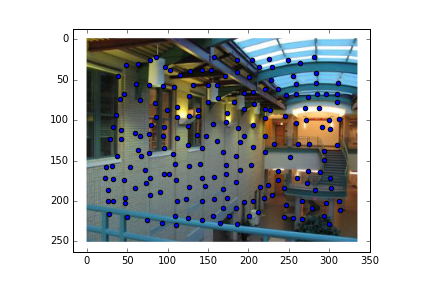
After ANMS
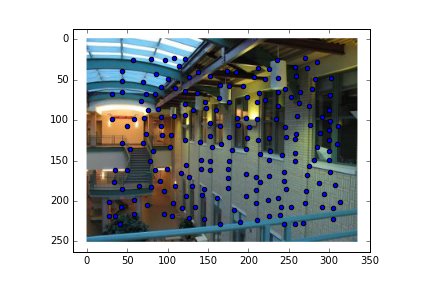
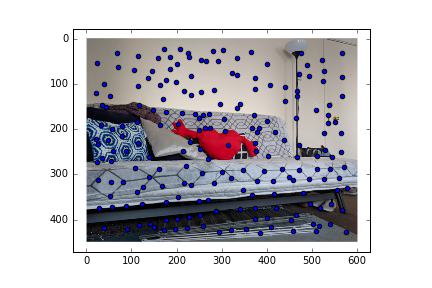
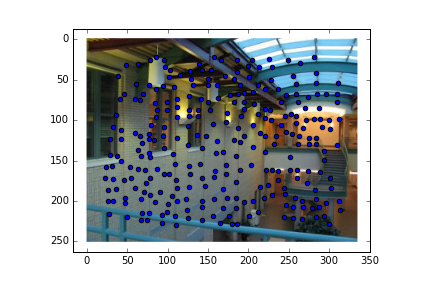
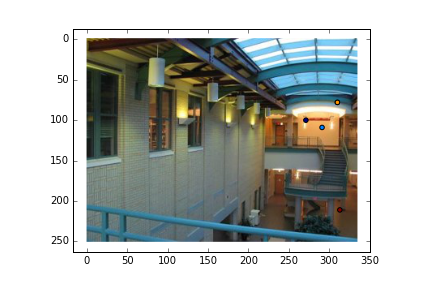
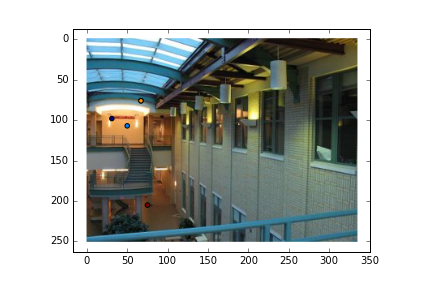
Feature Matching
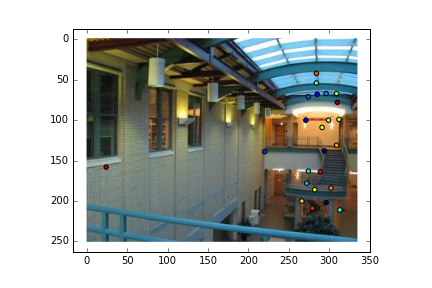
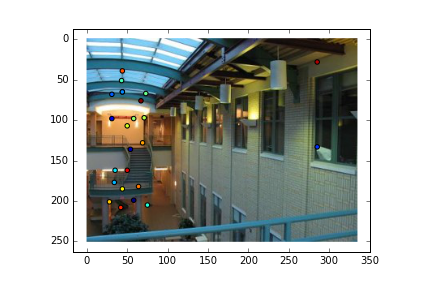
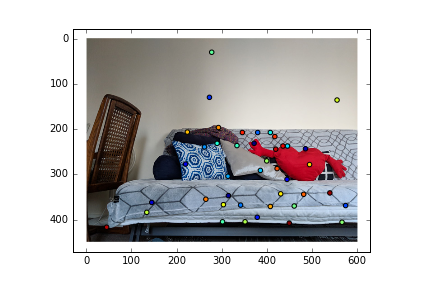
RANSAC
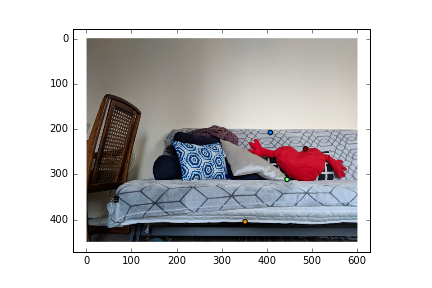
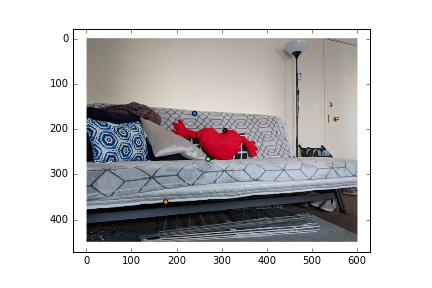
Final Mosaic: Manual (left) vs Automatic (right)