CS 194-26: Image Manipulation and Computational Photography
Project 6: [Auto]Stitching Photo Mosaics
Tony Pan, CS194-26-adn
Part A: Image Warping and Mosaicing
Overview
This first part of the project focused on image warping and mosaicing. This
involves manually defining point correspondences on one or more images,
calculating the homographies between these points, and warping (and or
blending) to achieve a result image.
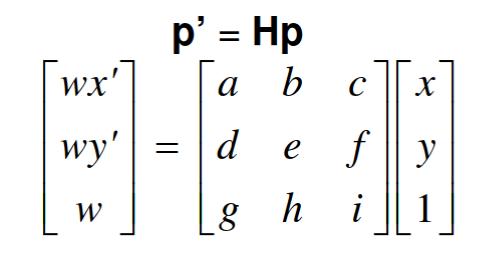
Part I: Recovering Homographies
This part involved calculating the homography H that allows us to map between
different projections. In this case, using the equation below, we are able
to create a series of equations that can be then solved using least-squares
(provided more than 4 correspondences are given). The solution to the
least-squares problem are the values a through h of the homography, with i
being 1.
Part II: Image Warping & Rectification
Given the homography, it becomes relatively simple to warp or rectify an image.
The process involves resampling the image using an inverse warp, such that
values in the warped image are interpolated from the original. This process
allows for some pretty interesting effects, such as warping an image such that
a certain plane is front-parallel. The images on the left are before the warp
is applied, and the right set of images shows the effects of rectification.
As can be seen, both images have some planar surface that has been warped
to be front-parallel.
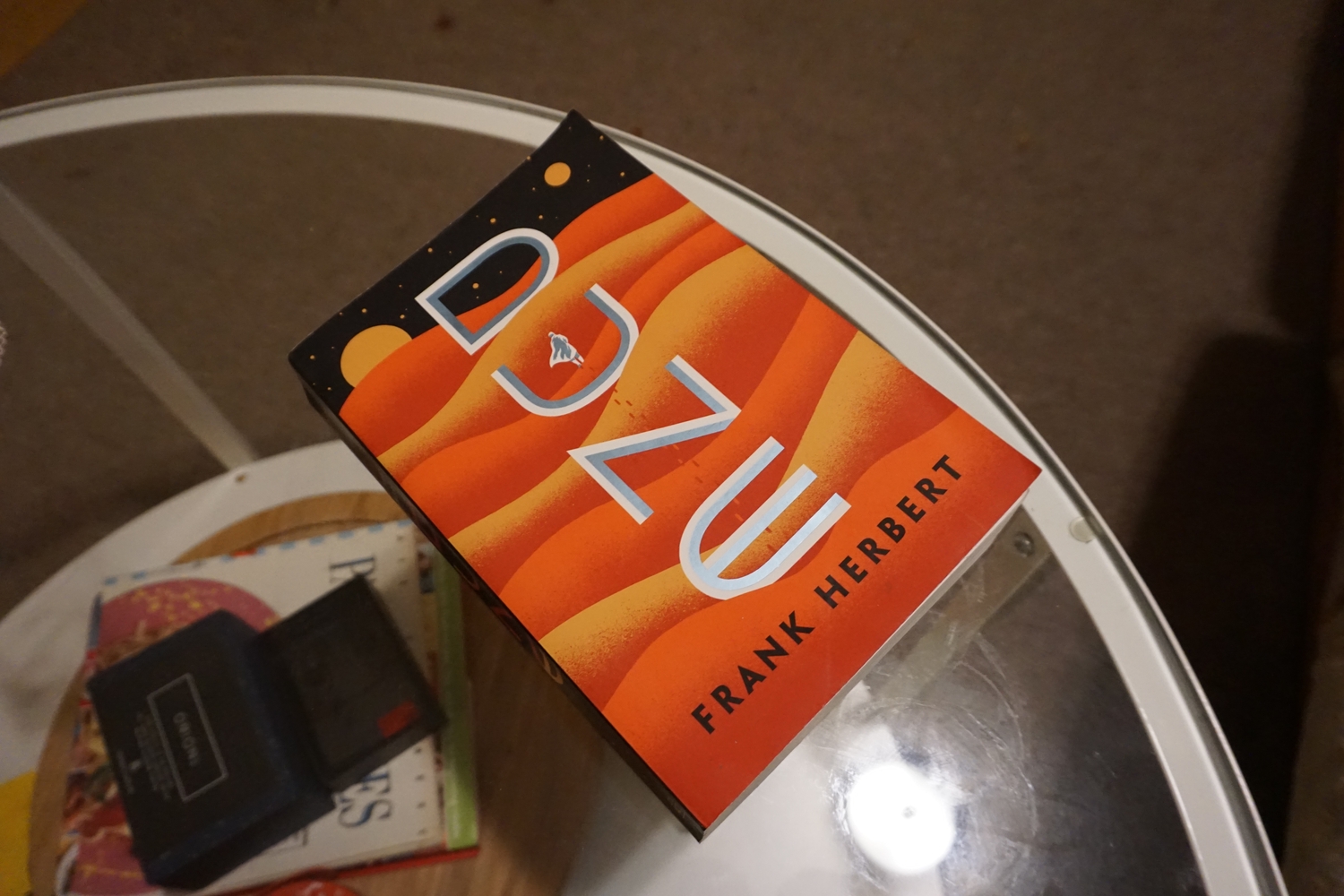
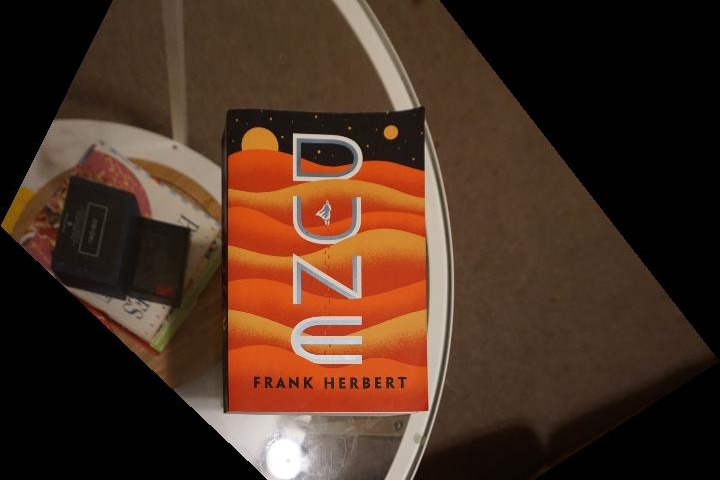
Part III: Image Mosaicing
Image mosaicing operates similarly to image warping, only in this case two
images are warped to some central correspondence and joined. Defining matching
correspondences was pretty hard using ginput, but I ended up getting some
good results without having to pixel-match too hard.
In the above mosaic, I had some trouble getting everything to match up, and
there are still some artifacts visibile after laplacian blending. For instance
the gray sedan in front of the house has some noticeable artifacts near its
bumper area. Though it may be possible to achieve a better blend with
better correspondences, this was the best result I got on that set of images.
All in all, I think that this method of creating mosaics works quite well, so
long as you are able to define correspondences that match each other closely.
Part B: Autostitching
Overview
Instead of manually defining correspondences as in the last project, this next
part uses Harris corner detection, Adaptive Non-Maximal Suppression, feature
matching, and RANSAC to automatically come up with a set of viable
correspondences. This results in a faster and pain-free process of mosaicing,
with absolutely no pixel peeping required.
Part I: Detecting Corner Features
Corners are relatively easy to pinpoint, and as such are a great way to define
'points of interest'. Harris corner detection is used to find corners, by
examinng differences in pixel intensity within a given neighborhood. The code
needed to run Harris corner detection was (thankfully) already provided.
Running corner detection yields several thousand points, many of which will
eventually be discarded through ANMS and RANSAC. Some examples of corner
detection outputs are shown below.
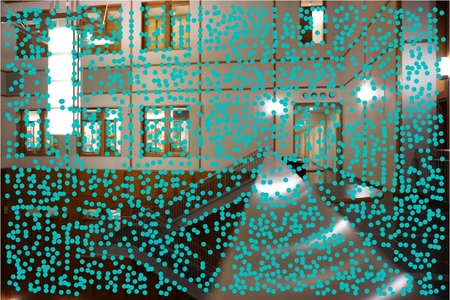
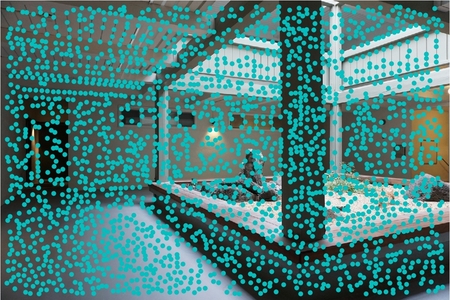
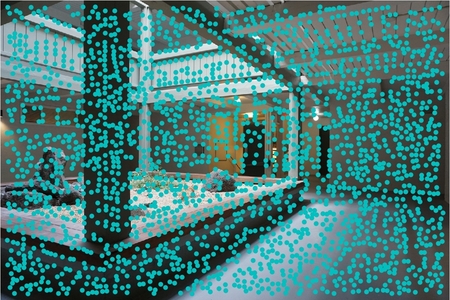
Part II: Adaptive Non-Maximal Suppression
Harris corner detection yields far too many points, so some means of
suppressing the number of interest points in an image is needed. Adaptive Non-
Maximal suppression allows us to restrict the number of interest points,
while making sure they are well distributed throughout the image. ANMS
essentially chooses the 'strongest' corner within a certain radius r. The n
points with the greatest r are retained, and the rest of the points are
discarded. The images below show the effects of ANMS, with n = 250, 500, 500
for each row respectively. In practice however, I chose to use n > 1000, as
it ended up yielding a greater number of correspondences later and generally
resulted in a better mosaic. This was largely dependent on the images I was
blending, as some would work just fine with 250 or 500 interest points, while
others needed far more.
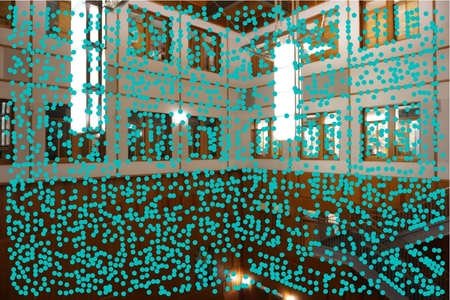
Part III: Feature Extraction And Matching
Having sufficiently suppressed the interest points, we must now extract actual
features from the images, to use in feature matching. To do so, we take a 41 x
41 pixel patch around a given point of interest. This patch is then
downsampled to 8 x 8 pixels in order to make features less sensitive to noise
and small shifts. Features are then bias/gain-normalized, such that their mean
is 0 and variance is 1. Some example features taken from an image are shown
below, with each teal square on the bottom image corresponding to its
respective feature.
Part IV: RANSAC
Because there might be incorrect points left over from feature matching, we
use 4 point RANSAC(RANdom SAmple Consensus) to find a set of correct
correspondences from which a homography can be calculated. The process is
pretty straightforward, and involved repeatedly taking 4 sets of points
randomly and computing a homography on them. This homography is applied to the
complete set of points, with each warped point being compared to its
corresponding matching point. If a warped point is sufficiently close to its
matching point, then it is added to an inlier set. This process is repeated
many times (I ran 1000 iterations), and the largest inlier set is used to
compute a robust homography used in mosaicing. As can be seen below, RANSAC
is very good at finding matching features.
Part V: Autostitching Results
The results of the autostitching results, as well as the manual-correspondence
mosaics are shown below. In each pair of images, the top image is the mosaic
generated from manually entering correspondences, and the bottom image is
from autostitching.
For the most part, autostitching yields a result that is at least as good as
the mosaics from the previous part of the project. The first two pairs of
mosaics are virtually indistinguishable from one another in overall quality.
There is a visible improvement in quality in the third autostiched mosaic,
where visual artifacts previously visible on the gray sedan and sidewalk have
been resolved. It was a painstaking process to define correspondences manually,
and I often had to repeat the process many times to get a good mosaic.
Autostiching makes the process many times easier by removing the imprecision
of human-entered correspondences, and instead using automatic feature matching.
The only major issue I noticed with autostitching was that I would sometimes
have to tweak certain values to achieve an ideal result, but it was overall a
far superior method of mosaicing than manually recording correspondences.
Part VI: What I Learned
It was very cool to see how an automated process could find and match features
in a set of images, to create a mosaic of better quality than a person could.
There were some very interesting algorithms used, like RANSAC and ANMS, that
were pretty ingenious in helping yield a better result. Overall, it's a pretty
magical process to watch unfold, and I think it's pretty amazing how good the
results consistently are.