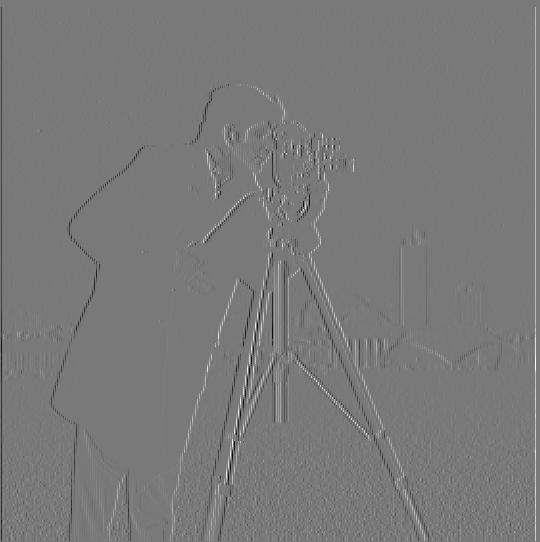
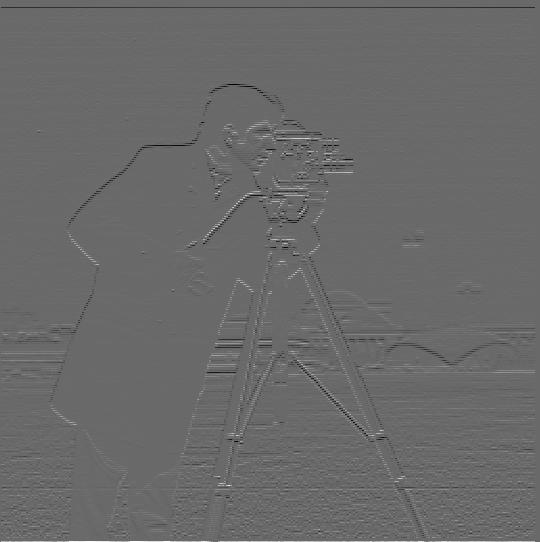
As the first step of the implementation of this naive version of edge detection implementation, I convolved the original cameraman image on with [1, -1] on the x-axis dirextion and y-axis direction sepreately. Since these two images only contains edge on one direction, I combined their information together (via root of square sum quation) and thus obtained the gradient magnitude of the original image. By binarize the gradient magnitude with a threshold of 0.17, the gradient image successfully transformed into a edge image. Below are the results:

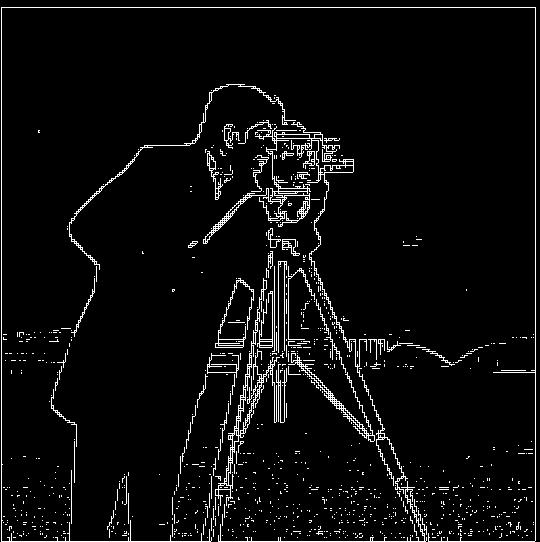
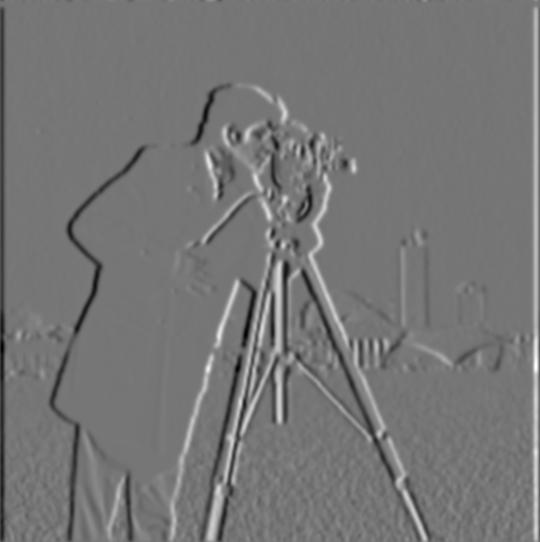
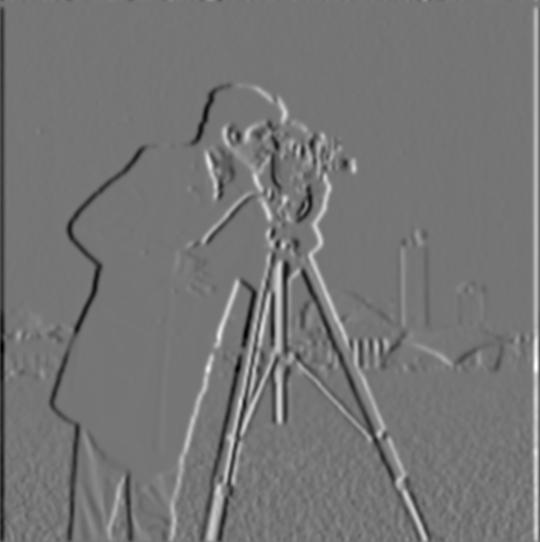
Although I carefully picked the threshold for the binarization process in the previous version of edge detection, the result still seems very noisy and if you look close enough, you will notice that the edge it outlined is basically composed by lots of squares. To obtain a smoother result, I replaced the naive filter with our dear Gaussian filter. The first method is blur the input image first with a 2d gaussian filter first then convolve it again with the two finite difference filter we used in the previous part. Below is the result I obtained:

Answer to question 1.2: By compare the manitude image I obtained from part 1.1 and part 1.2, it is obvious to see that with the help of Gaussian blur, the manitude image become much more clean, and the nasty box like partten we observed from the part 1.1 implementation is also disappeared. The binarized edge image also becomes clean and decent even with a much more smaller conversion threshold (0.05 v.s. 0.17)
Thanks to the nice math characteristic of the convolution operation, we could combine the previous two convolution together. The result is shown as below, and as we can see the pics is exactly the same with the result we obtained in the previous step:
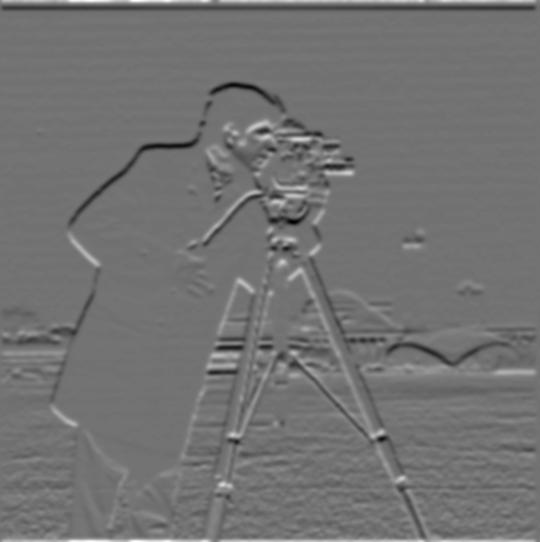
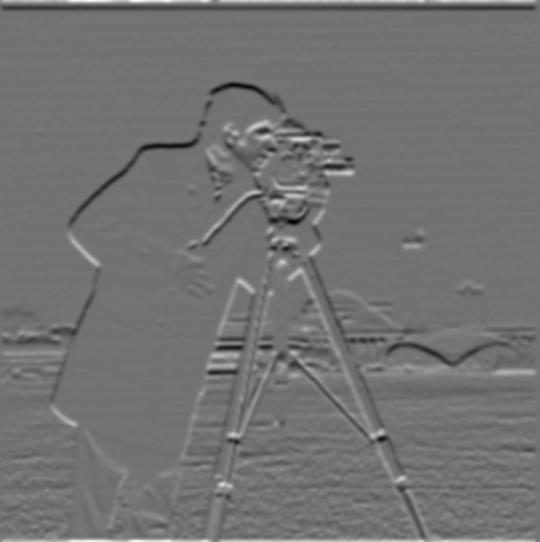 Convolution result generated by the original image with DoG filter Gx and Gy
Convolution result generated by the original image with DoG filter Gx and Gy
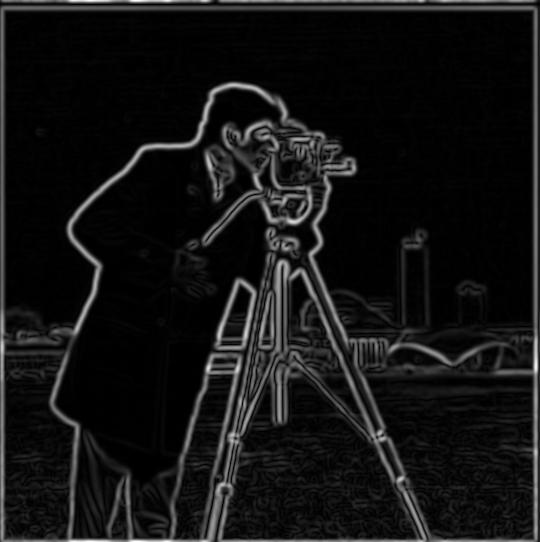
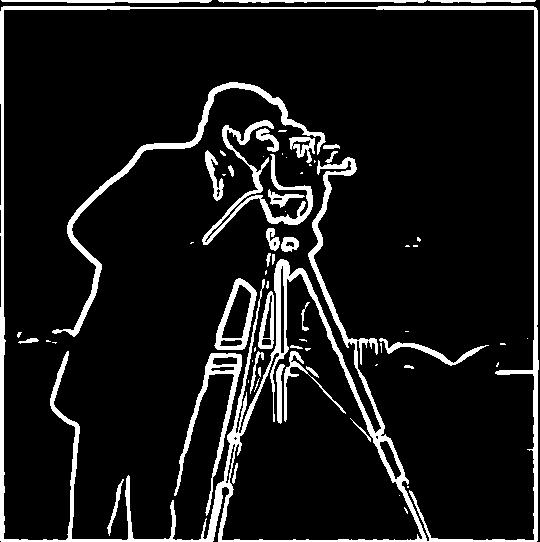
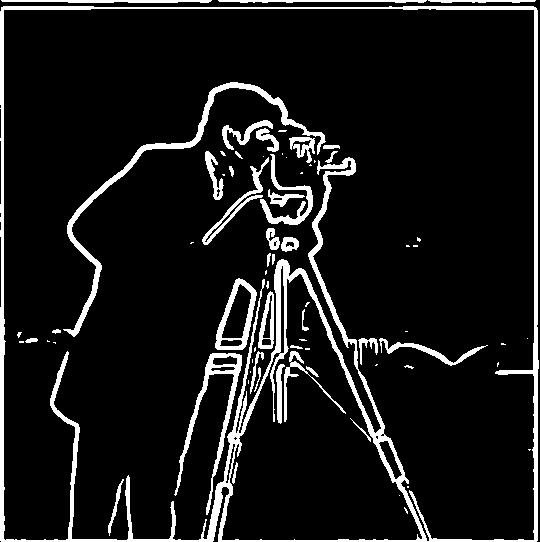 Image magnitude generated by the two image above and its binarized version, threshold = 0.05, same as above
Image magnitude generated by the two image above and its binarized version, threshold = 0.05, same as above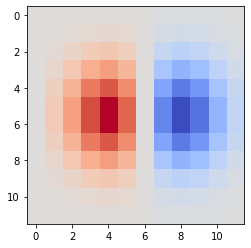
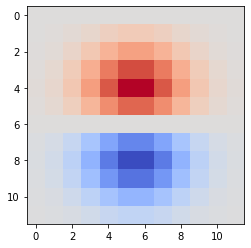 The two DoG filter on direction x and y, color mapped to "coolwarm" to show the contrast
The two DoG filter on direction x and y, color mapped to "coolwarm" to show the contrast
In this part, I took two different approaches to make my blurry image looks more sharp (i.e. add more high frequency detail into the original image). The first one is a more step by step process, I first make the original bulrry image even more blur by convolve with our dear Gaussian filter, then I subtract this low frequency, blured Taj from the original Taj picture and this will allow me to obtain the high frequency part of the original image. By add the high frequency part back to the original image several times allows me to obtain a more sharp image.
This process is can also be repleced by a signal convolution, the unsharp masking filter. By subtrack the gaussian from the unit impulse (detailed function:(1 + sharp index)e − sharp index * g), we obtained the laplacian of gaussian. After convolve it with the orignal blurry image, we will have exactly the same sharped image as what we obtained from the previous method. Below is a compare between the original taj and the version given by unsharp masking filter:






 >>>low pass>>>
>>>low pass>>>

 >>>high pass>>>
>>>high pass>>>




For this part, the kernel size I choose is 30 and the sigma is 15; I taked a slightly sifferent order compare with the original algorithm published on the paper to blend the gaussian blured mask and the laplacian stack, so in below the color is slightly different with the original paper, but the blend result is still good: