CS 194-26: Project 4A
By Prangan Tooteja
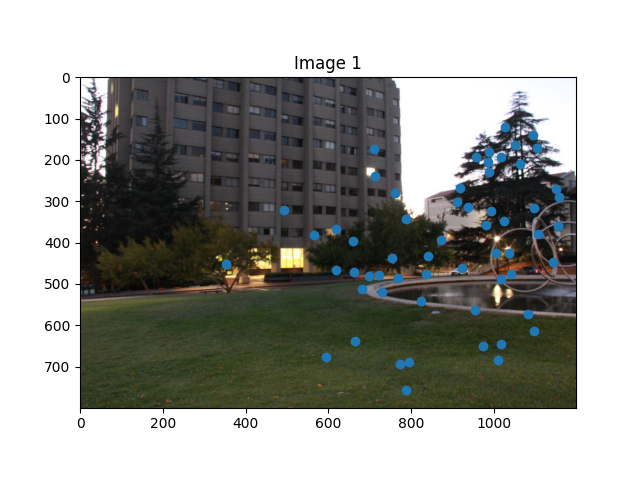
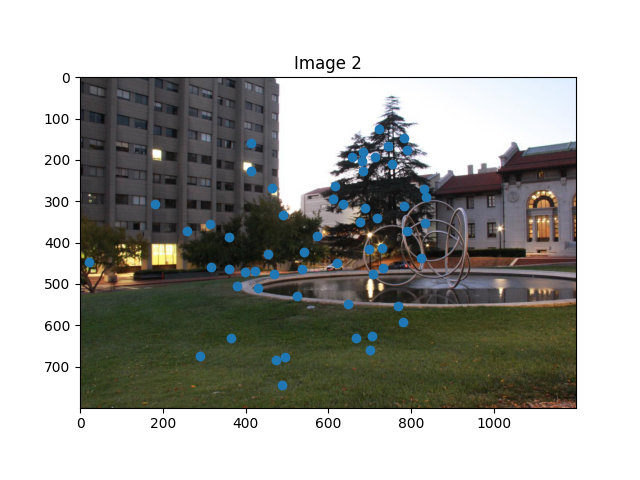
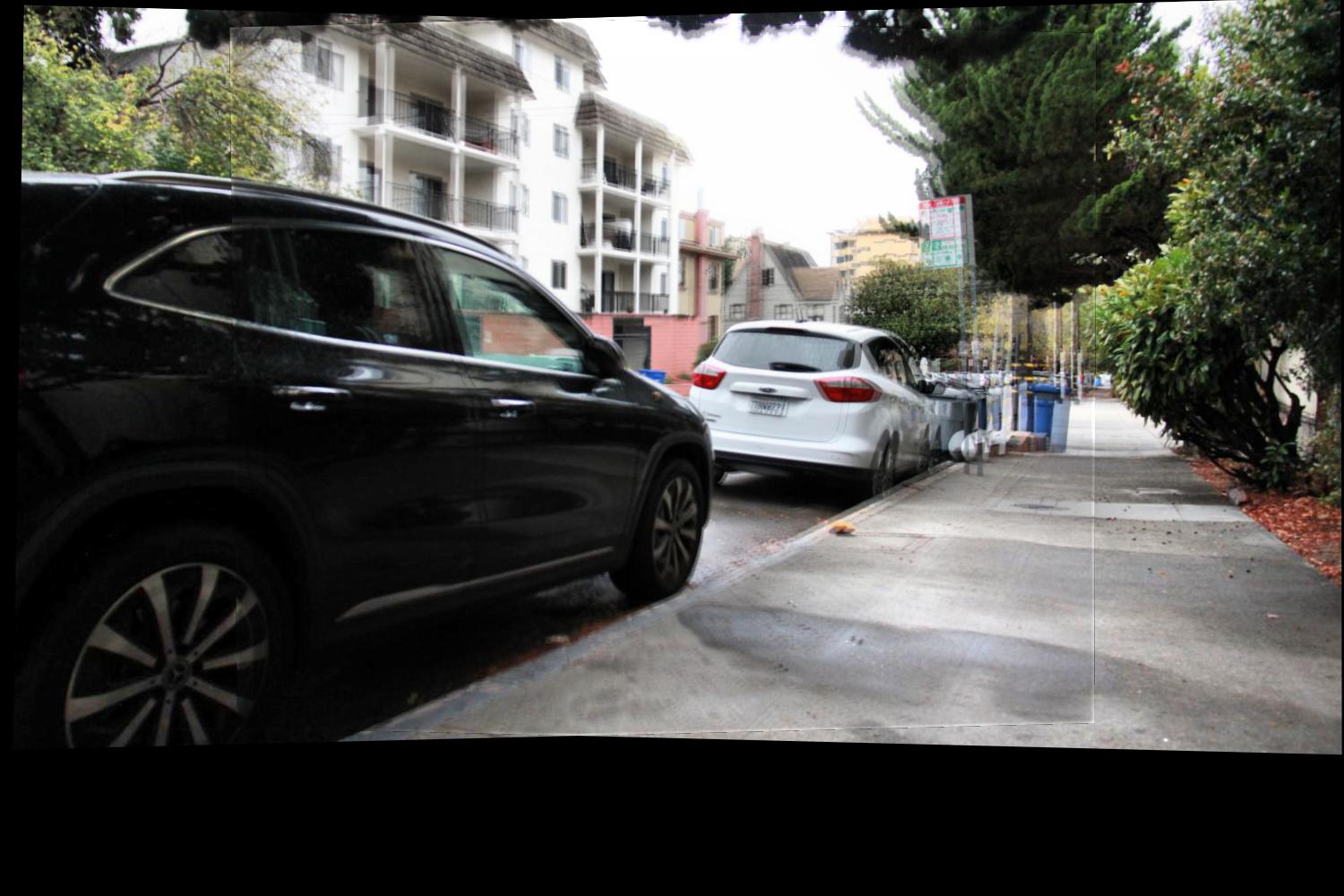
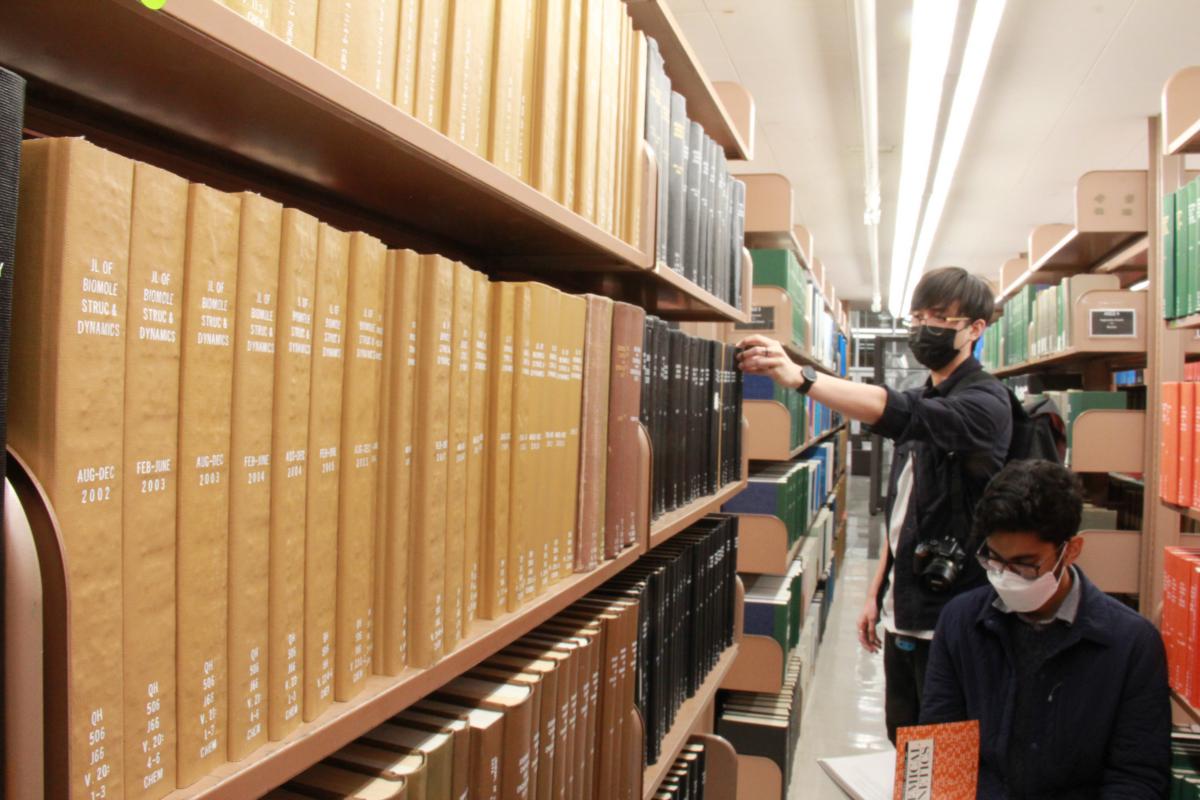
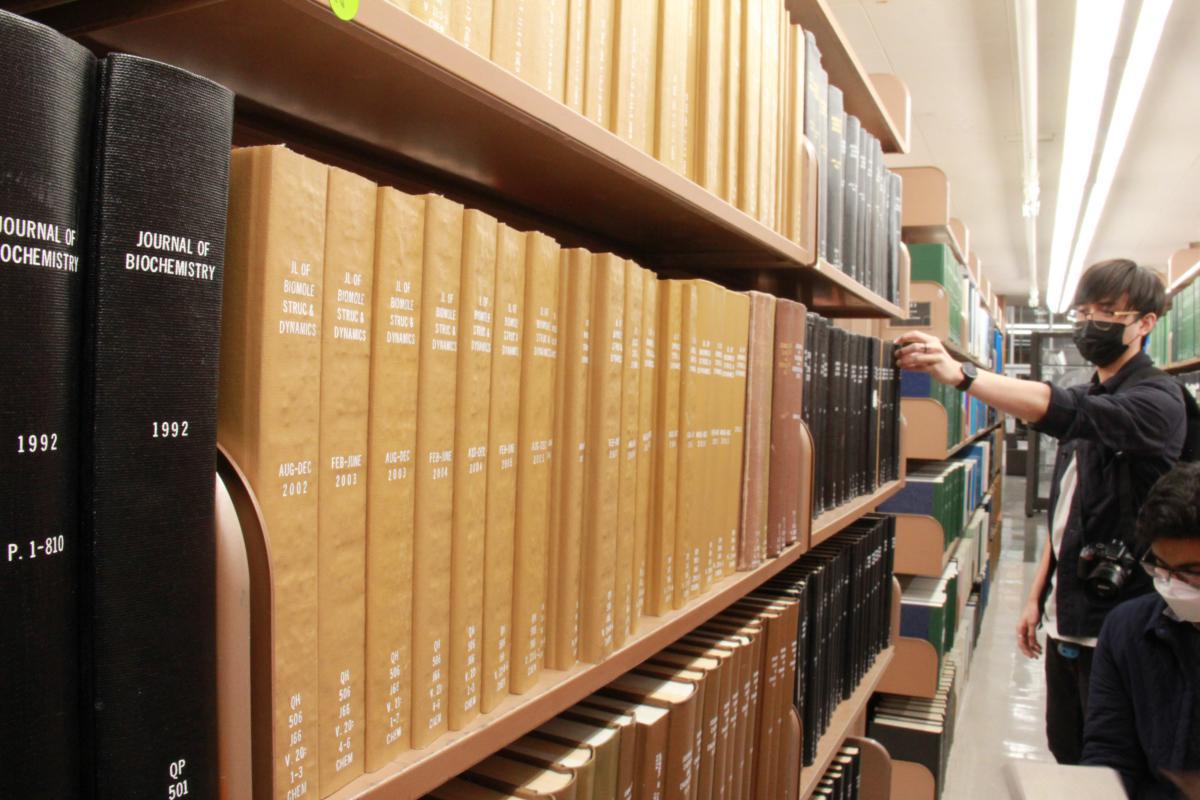
Shoot Pictures
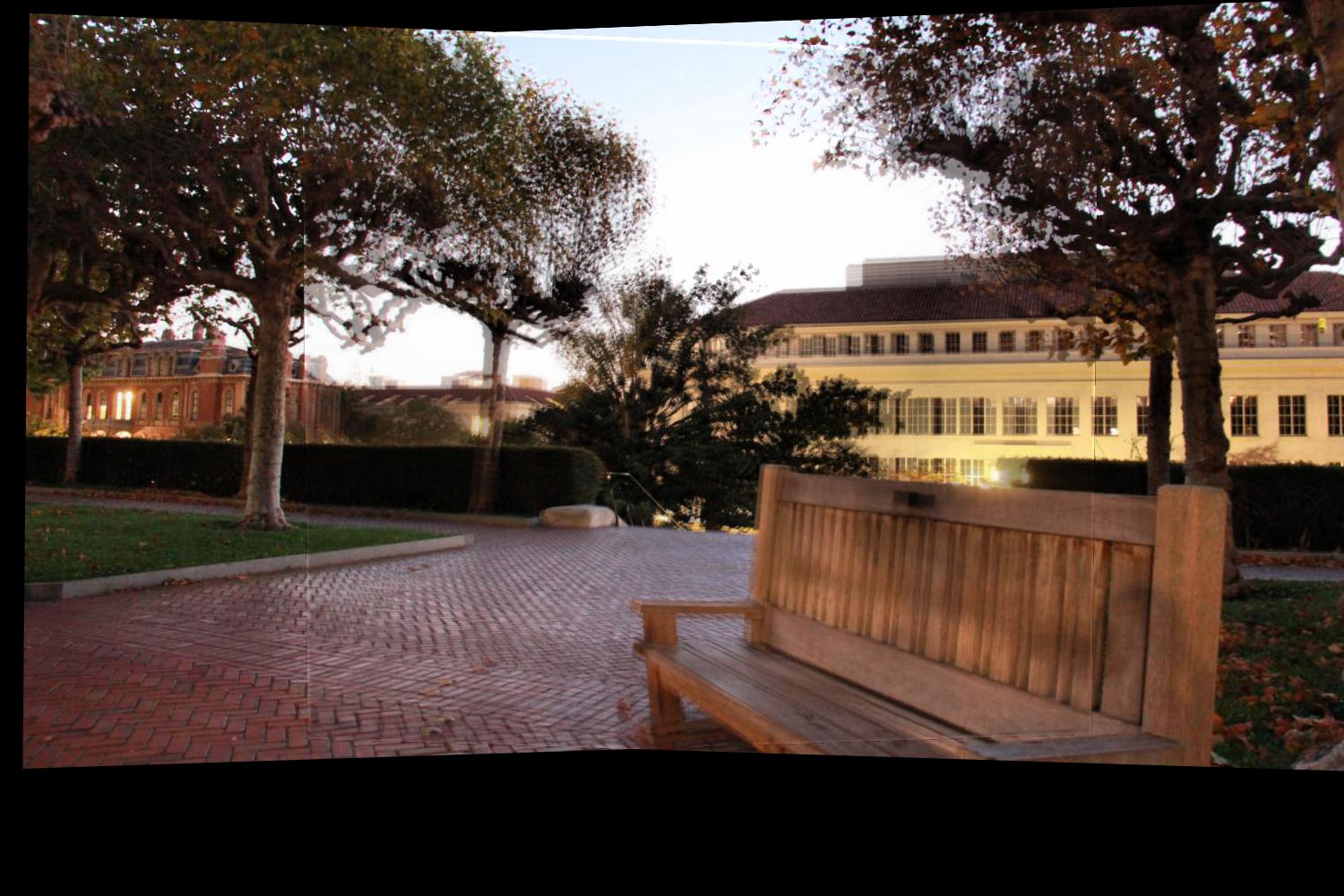
The goal of this task was to shoot images from the same point of reference. For this, I used a tripod and a digital camera to capture the images. Below are the images I used for this project.

|

|

|

|
|
|
Recover Homographies
The goal of this task was to recover a homography matrix for each pair of images to stitch together.
This resource source
contains good explanations of how the matrix can be found given two sets of matching points.
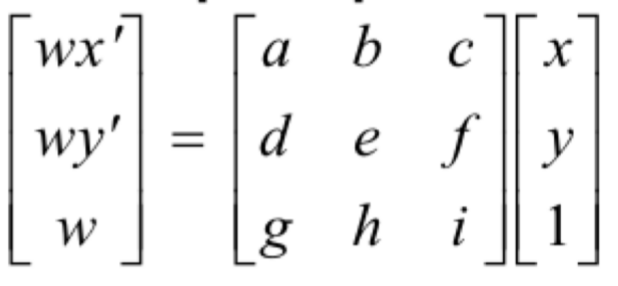
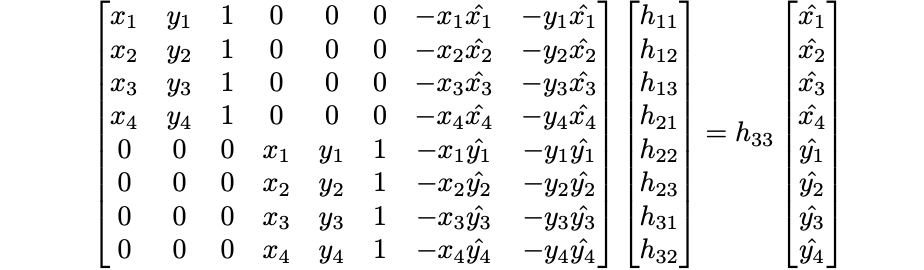
To summarise, we wanted to find a matrix such that we could put our transformation into the form:
p' = Hp. Below is the simple form of the matrix which is then expanded into the second, larger calculation that
we can solve for using least squares.
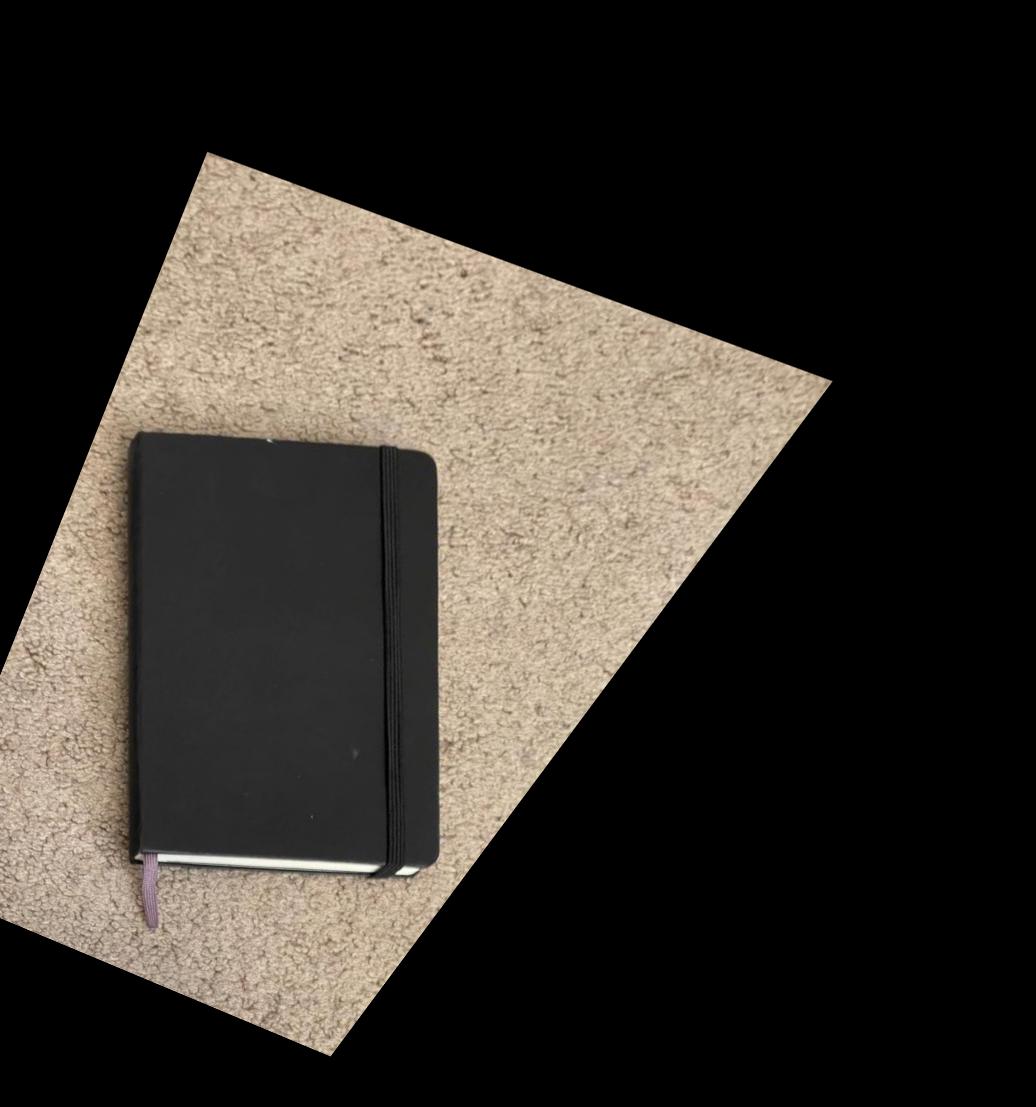
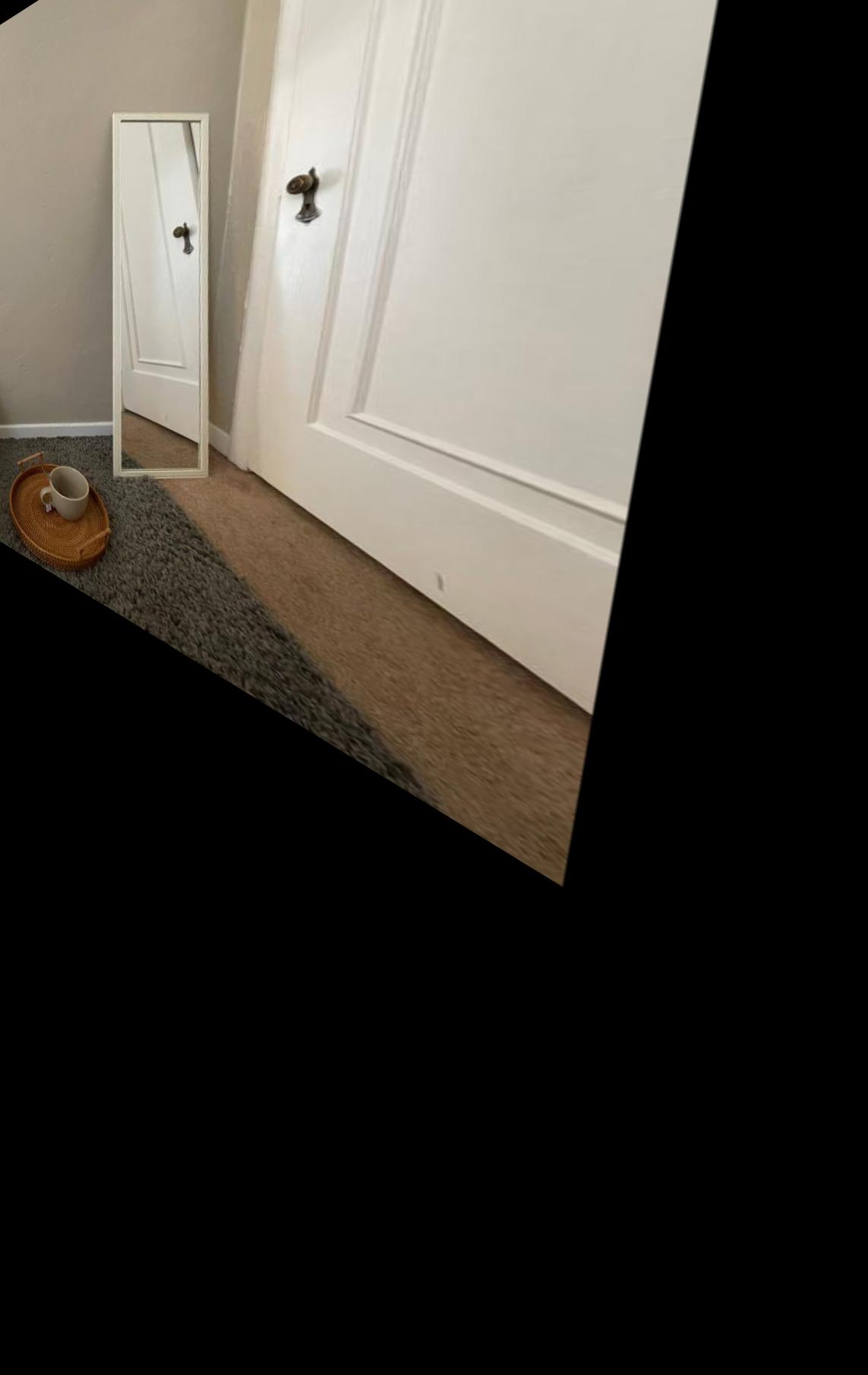
Warp the Images (Rectified Images)
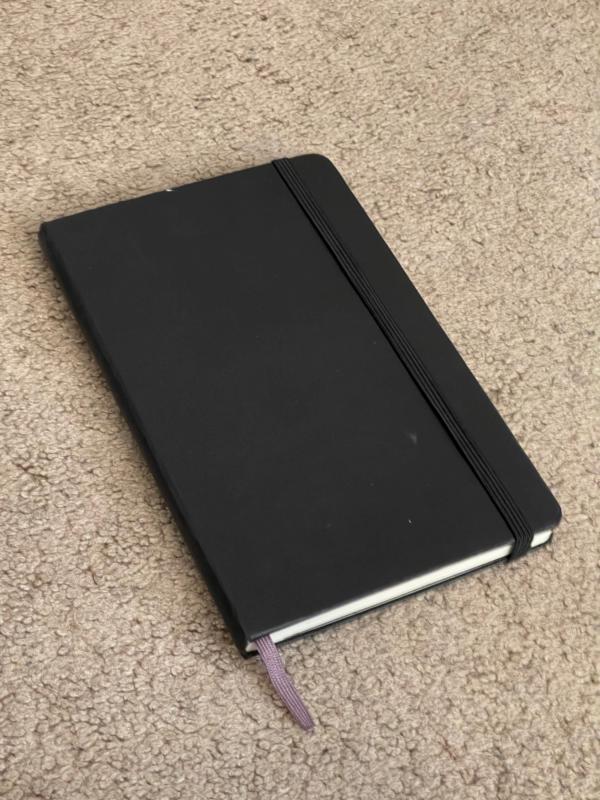
Given the homography matrix, define correspondences by defining points that would appear to rectify the input image. Below are two pairs of images, one of a notebook and the other of a mirror that have been rectified so that they appear to be directly facing the camera.
|
|

|
|
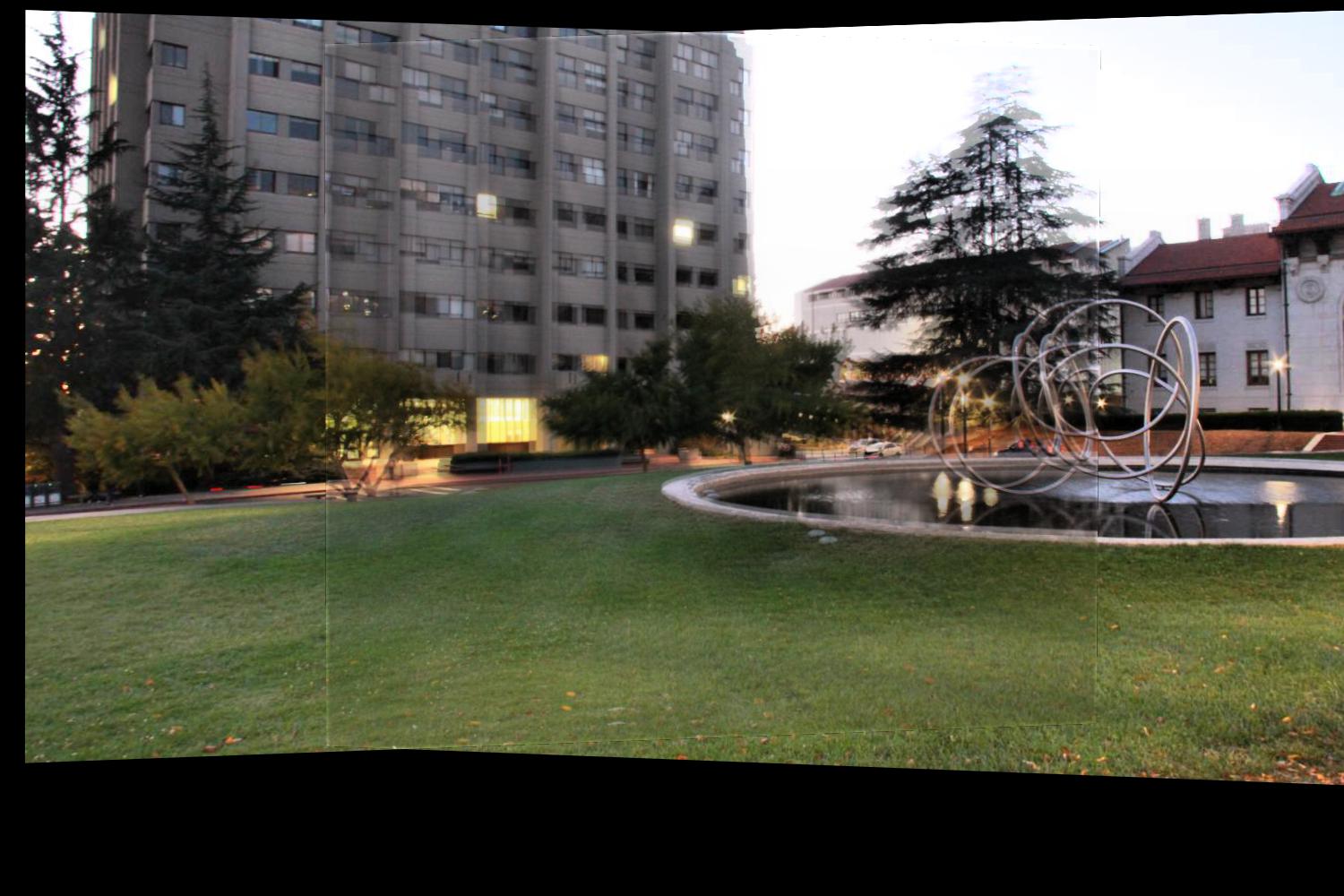
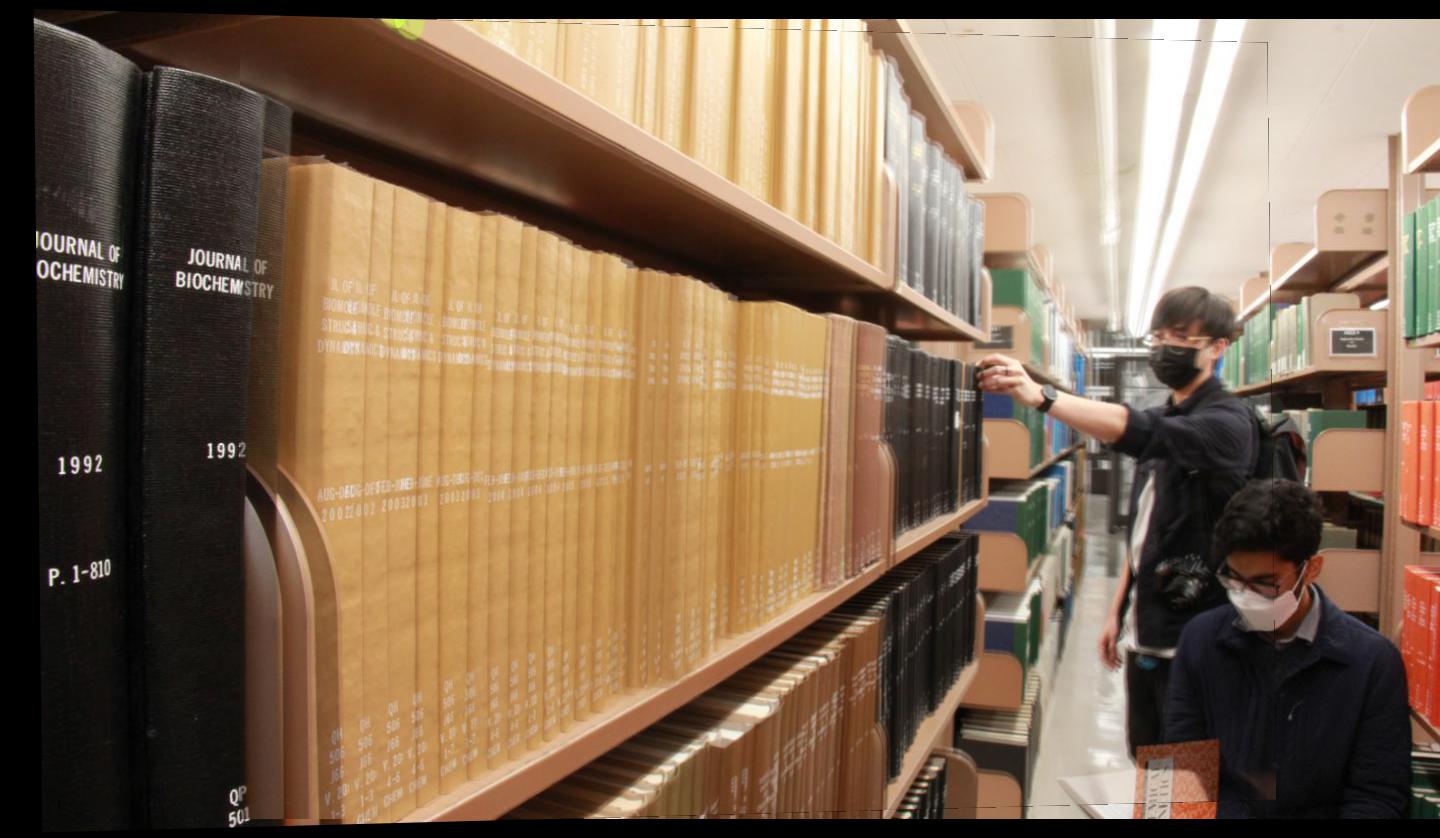
Blend Image into Mosaic
The goal of this task was to use the images from the same point of reference and blend them into a mosaic. To blend the image I used an alpha mask as suggested so that every image had an equal contribution towards the output image.
|
|
|

|
|
|
|

|
|
|
|

|
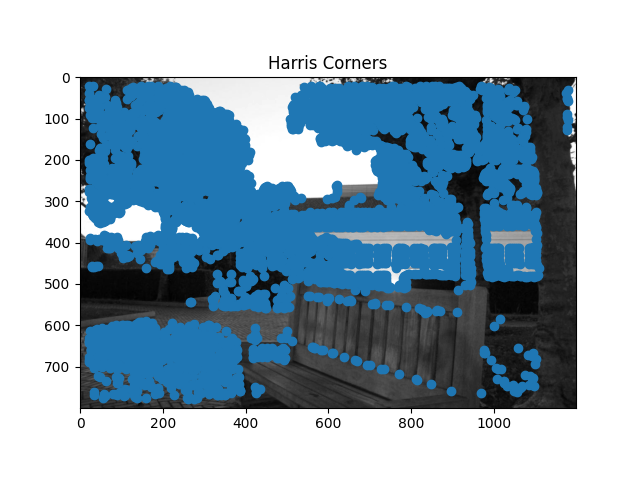
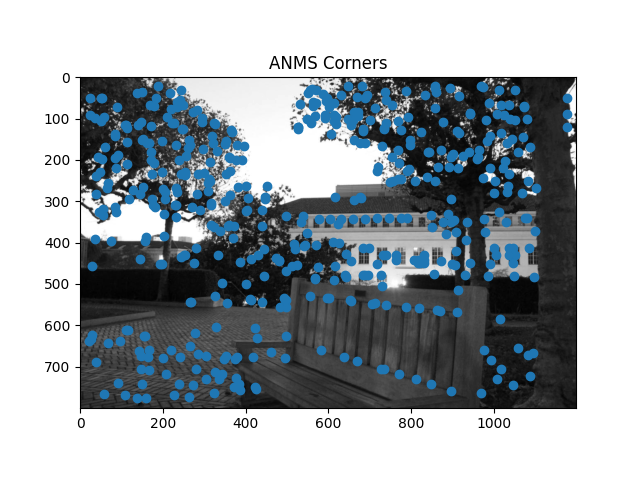
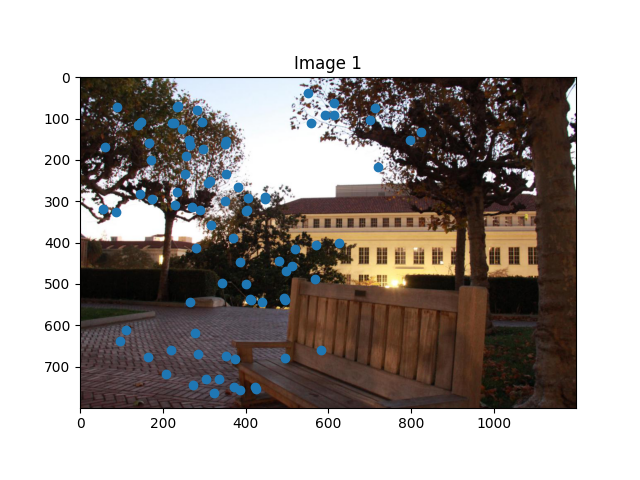
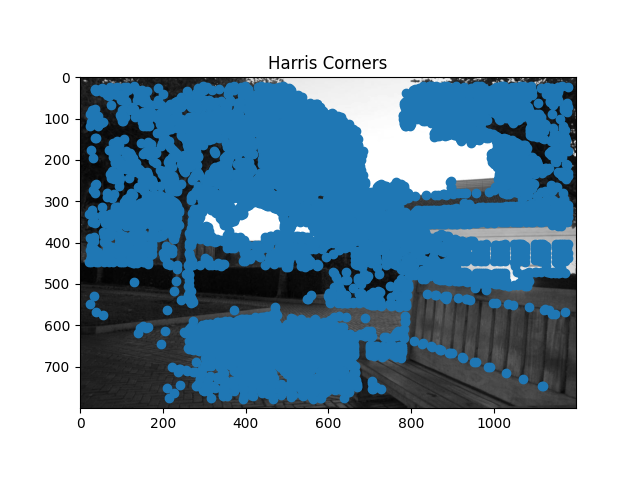
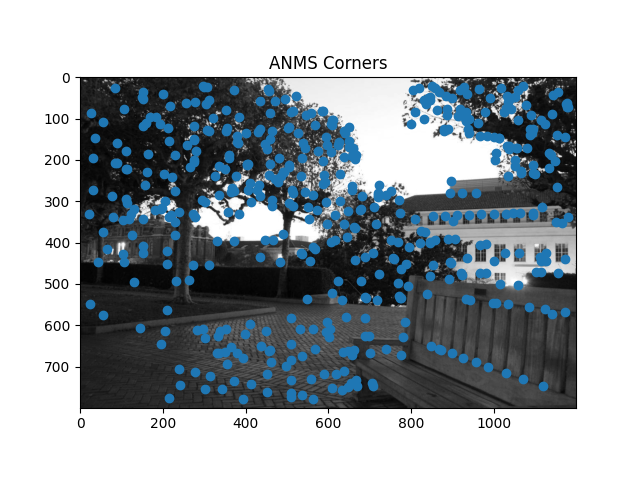
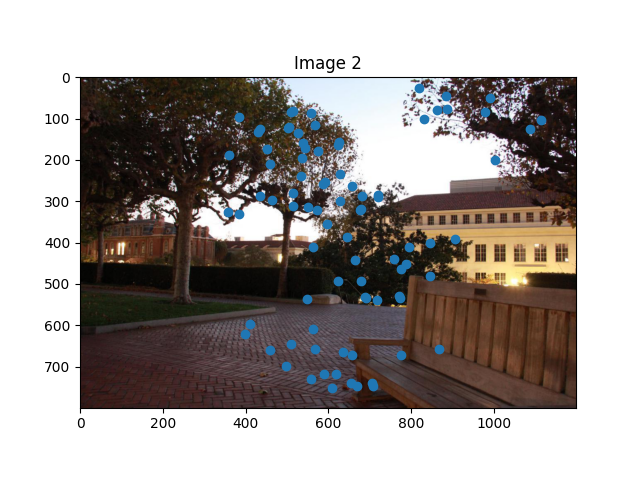
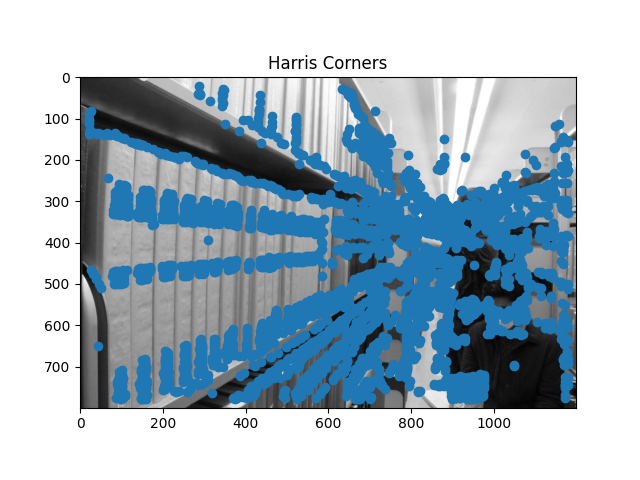
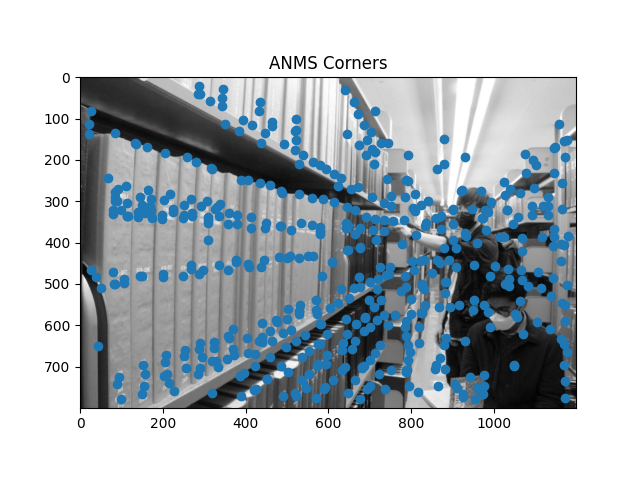
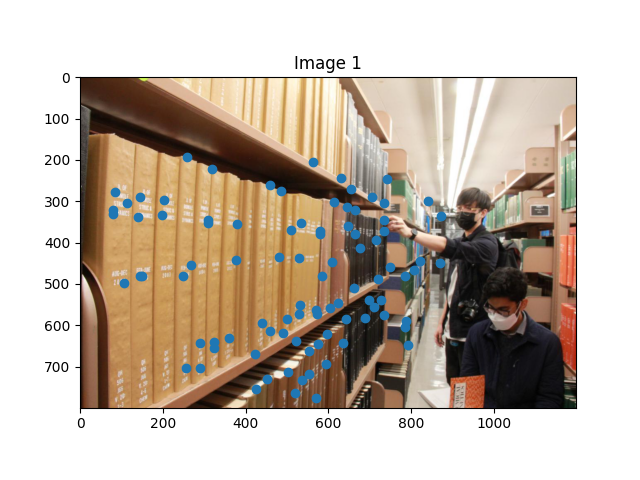
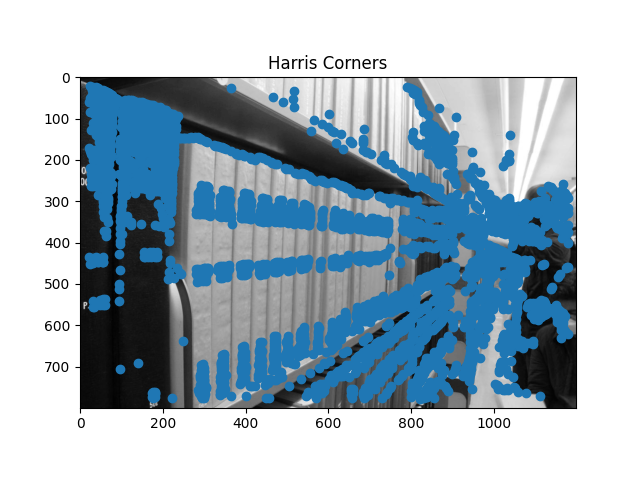
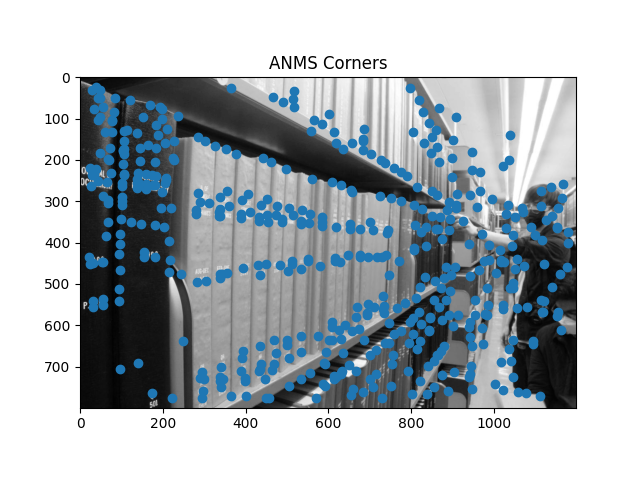
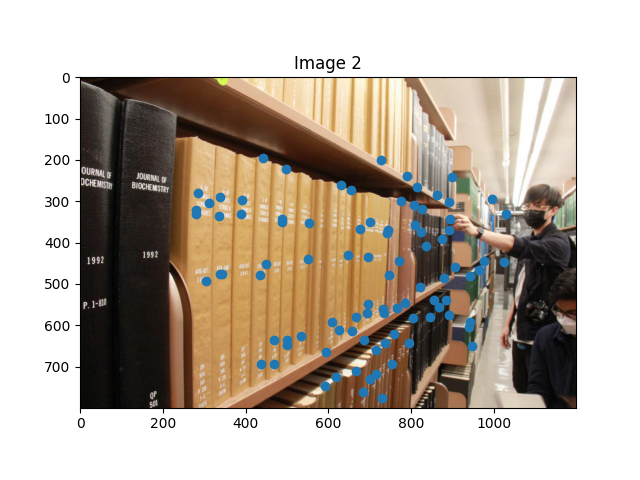
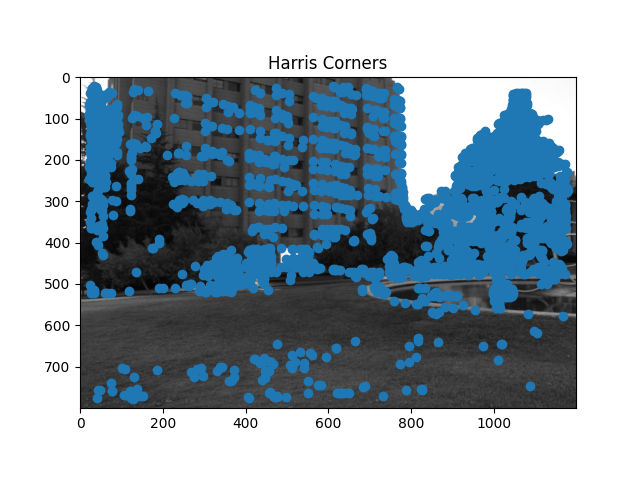
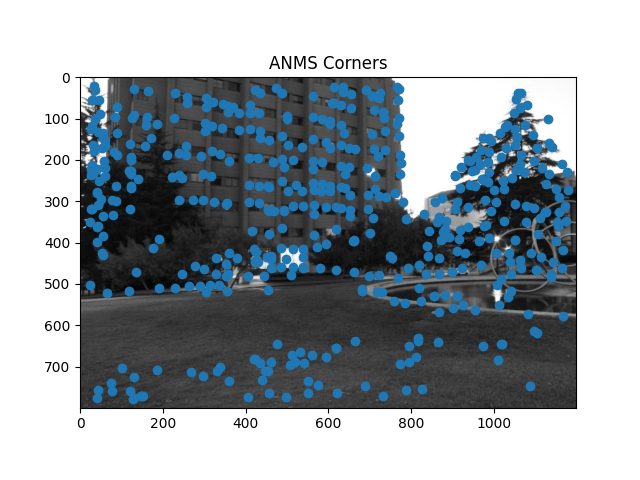
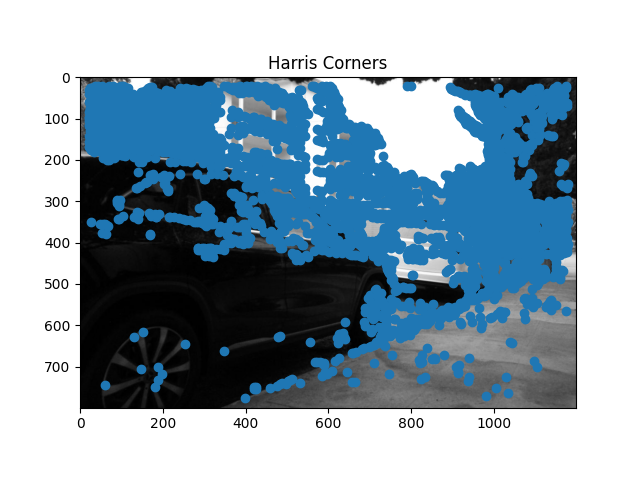
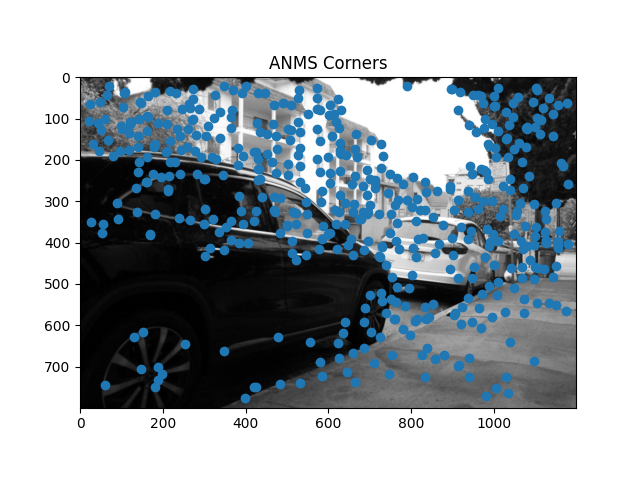
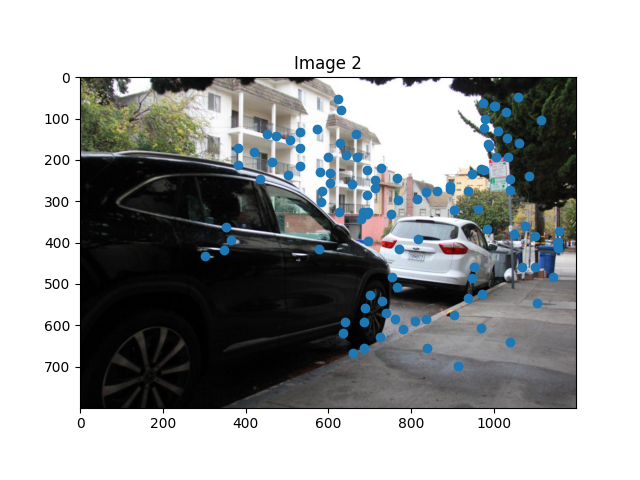
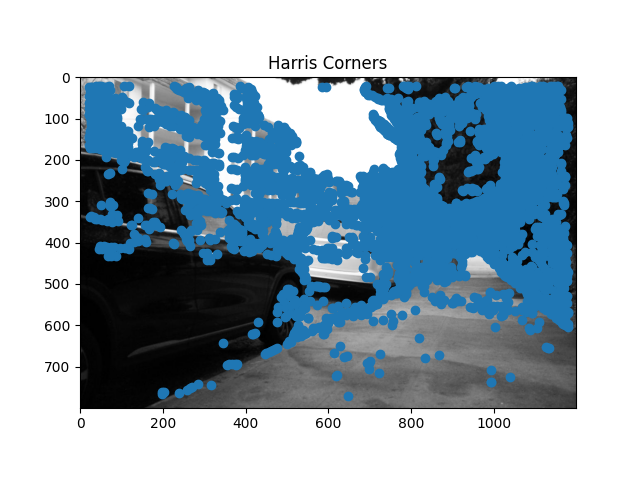
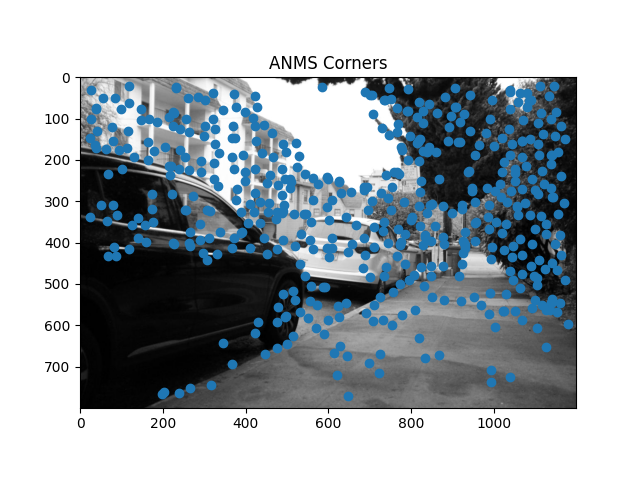
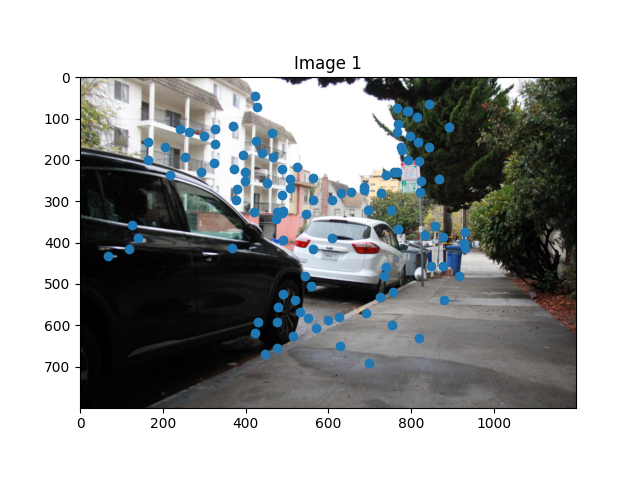
Coolest Thing You've Learned + Bells and Whistles
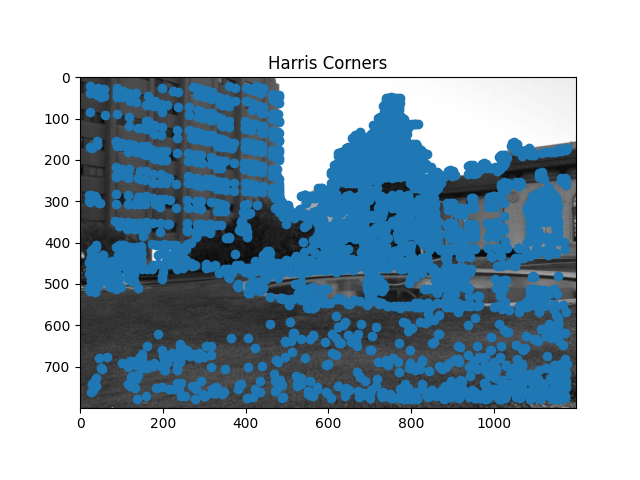
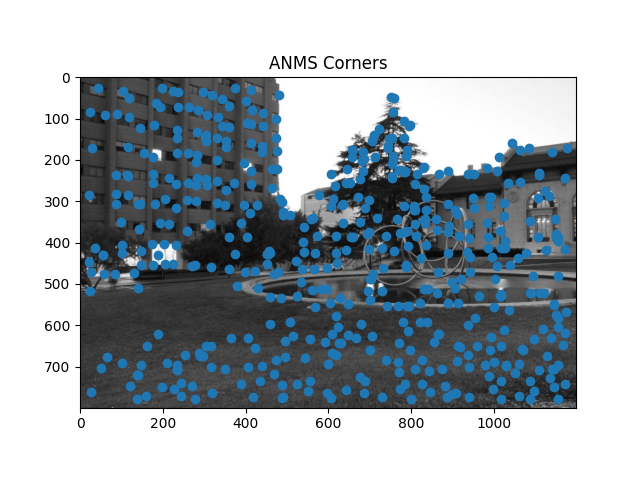
[EDIT] I should have looked at Part B earlier - I didn't realize that we would be implementing this ourselves in the next part. Still cool though While going through the documentation on skimage and opencv I came across a suite of corner detectors which could be used to automatically generate points on images. I tried using them on my images but the points don't always match perfectly. These are the results I got from the generated points. Here is the tutorial that I followed to learn about the skimage ORB feature link

|
|

|