Project 4a
Homographies
I recovered homographies by using least squares, with the algorithm shown in the lecture slides.
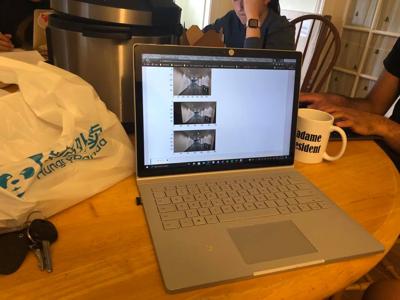
Rectify
To rectify, I selected the four points for the morphed rectangle in the image, and used the same morphing algorithm to morph the image to a manually coded rectangle in the middle of the image.
| Unmorphed laptop image |
Morphed laptop |
Unmorphed building |
Rectified building |
 |
 |
 |
 |
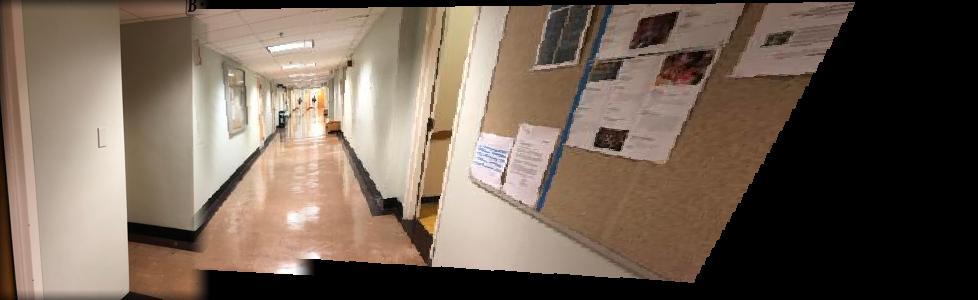
Mosaics
To stitch together mosaics, I created an array of images taken from the left-most pan to the right-most pan. Starting from the last image, I morphed the image to align with the previous image, then this
combined image to match the image before it, etc. I stitched all of the images together using gaussian blending (the method in project 3, with a blurred mask).
| Panorama 1, img 1 |
Panorama 1, img 2 |
Panorama 1, img 3 |
 |
 |
 |
| Stitched panorama 1 |
 |
| Panorama 2, img 1 |
Panorama 2, img 2 |
Panorama 2, img 3 |
 |
 |
 |
| Stitched panorama 2 |
 |
| Panorama 3, img 1 |
Panorama 3, img 2 |
Panorama 3, img 3 |
 |
 |
 |
| Stitched panorama 3 |
 |
Project 4b
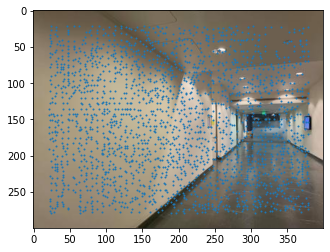
Harris points
I used the built-in code to find a lot of harris points for each image in a given panorama.
| Harris points for pano 2.1 |
Harris points for pano 2.2 |
 |
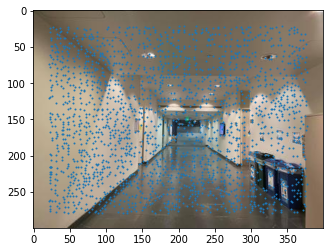 |
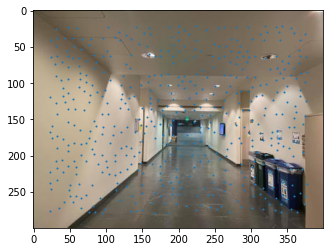
ANMS
I implemented ANMS as described in the paper, using the top 500 points in terms of maximum non-suppressed radius. Here are the ANMS points on the above images:
| ANMS points for pano 2.1 |
ANMS points for pano 2.2 |
 |
 |
Feature matching
For feature matching, I created feature vectors for each point by downsampling a 40x40 image around each point into an 8x8 image as described in the paper, normalizing the image, then flattening the vector.
For each point, I found the (different) point that had the most similar feature vector in terms
of distance (using the provided dist2), as well as the second most similar point. If the ratio of the best distance to second-best distance
was below the defined ratio (0.3-0.5, a hyperparameter), and if the best point was not already in a set of stored best matches, the match was added to the set of point matches.
Here are the matched points for the above images.
| feature example 1 |
feature example 2 |
 |
 |
| matched points for pano 2.1 |
matched points for pano 2.2 |
 |
 |
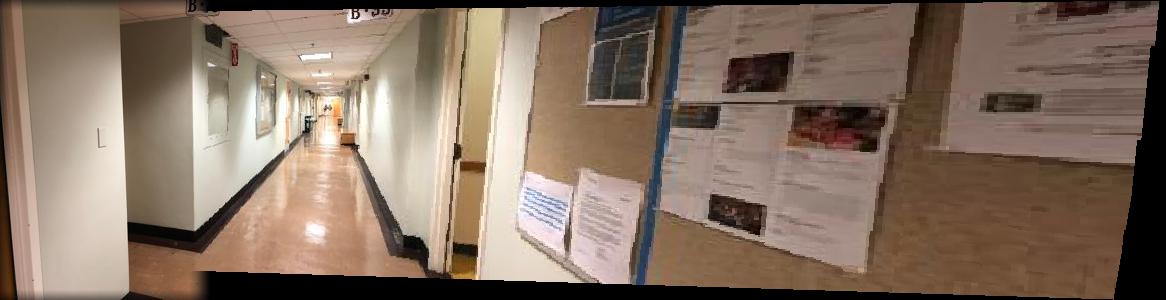
Below are the final auto-stitched panoramas on the left, alongside their manually-chosen-points counterparts on the right.
In general, it seems like the auto-stitching worked better, likely as there were just more points and higher accuracy.