By Nithin Chalapathi
nithinc@berkeley.edu
SID: 3032738412
The goal of this project is to use neural networks to build a facial keypoint detector. In many of the previous projects, the selection and annotation of keypoints is time-consuming and accounts for the majority of the time taken to generate any results. With an neural network facial keypoint detector, we can automate this. This project is broken into 3 different parts. Part 1, I built just a nose tip detector. In part 2, I built a full facial keypoint detector trained on the Imm Face Dataset. Finally, in part 3, I trained ResNet-18 and InceptionV3 on the full faces dataset, specifically the ibug faces in the wild dataset.
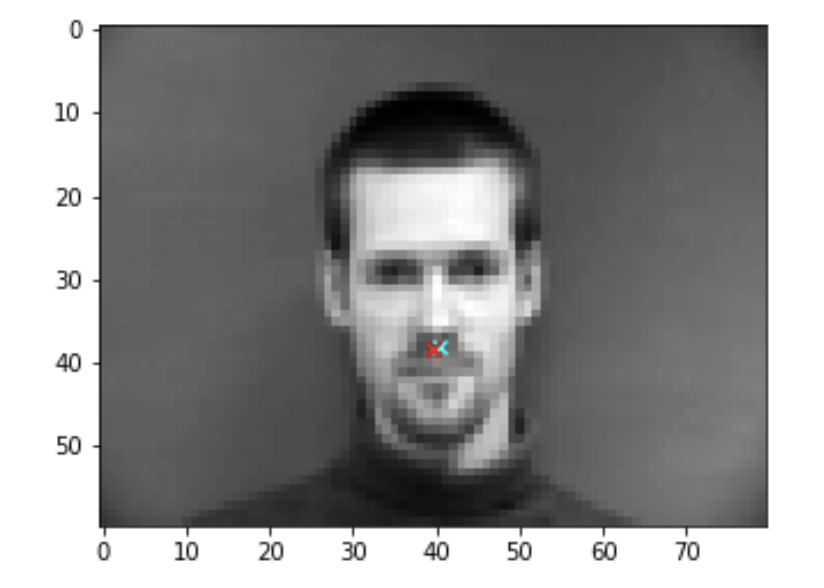
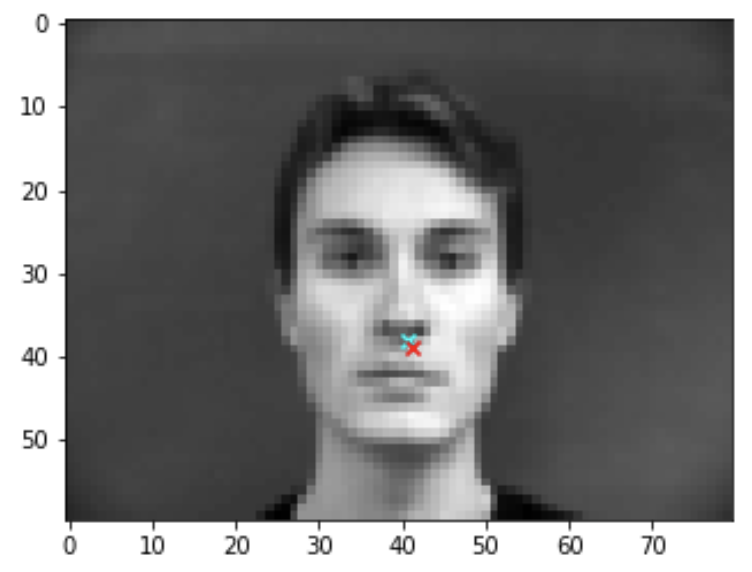
Here are some of the sampled images with the nose highlighted:
Each image is converted to grayscale, normalized, and scaled to 80x60. The first network I used is configured as follows:
NoseModel(
(conv1): Conv2d(1, 16, kernel_size=(3, 3), stride=(1, 1))
(pool1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv2): Conv2d(16, 24, kernel_size=(3, 3), stride=(1, 1))
(pool2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv3): Conv2d(24, 32, kernel_size=(3, 3), stride=(1, 1))
(pool3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv4): Conv2d(32, 16, kernel_size=(3, 3), stride=(1, 1))
(pool4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(fc1): Linear(in_features=48, out_features=24, bias=True)
(fc2): Linear(in_features=24, out_features=2, bias=True)
)
The loss I used was the MSError, and I used the adam optimizer with beta values of 0.9 and 0.999, and no weight decay. I fixed the number of epochs at 25.
For my hyperparameter search, I searched over learning rates [1e-2, 1e-3, 5e-4, 3e-4, 1e-4], batch sizes [2, 4, 8, 16, 32], and the number of conv layers [2, 3, 4]. The 4 layer network is as configured above. The 3 layer network:
(conv1): Conv2d(1, 16, kernel_size=(3, 3), stride=(1, 1))
(pool1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv2): Conv2d(16, 24, kernel_size=(3, 3), stride=(1, 1))
(pool2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv3): Conv2d(24, 32, kernel_size=(3, 3), stride=(1, 1))
(pool3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv4): Conv2d(32, 16, kernel_size=(3, 3), stride=(1, 1))
(pool4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(fc1): Linear(in_features=1280, out_features=640, bias=True)
(fc2): Linear(in_features=640, out_features=2, bias=True)
)
The 2 layer network:
(conv1): Conv2d(1, 16, kernel_size=(3, 3), stride=(1, 1))
(pool1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv2): Conv2d(16, 24, kernel_size=(3, 3), stride=(1, 1))
(pool2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv3): Conv2d(24, 32, kernel_size=(3, 3), stride=(1, 1))
(pool3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv4): Conv2d(32, 16, kernel_size=(3, 3), stride=(1, 1))
(pool4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(fc1): Linear(in_features=5616, out_features=2808, bias=True)
(fc2): Linear(in_features=2808, out_features=2, bias=True)
)
After running an exhaustive search, I found the configuration with the smallest validation error was the 2 layer network, a batch size of 2, and a learning rate of 0.0003. Here is a graph of it's training and validation loss.

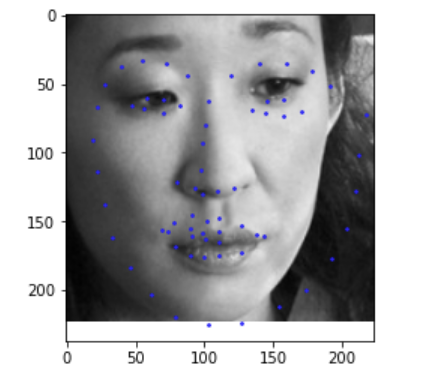
Here are two images where the network does particularly well: Blue is ground truth and red is predicted
Here are two images where the network does terrible:
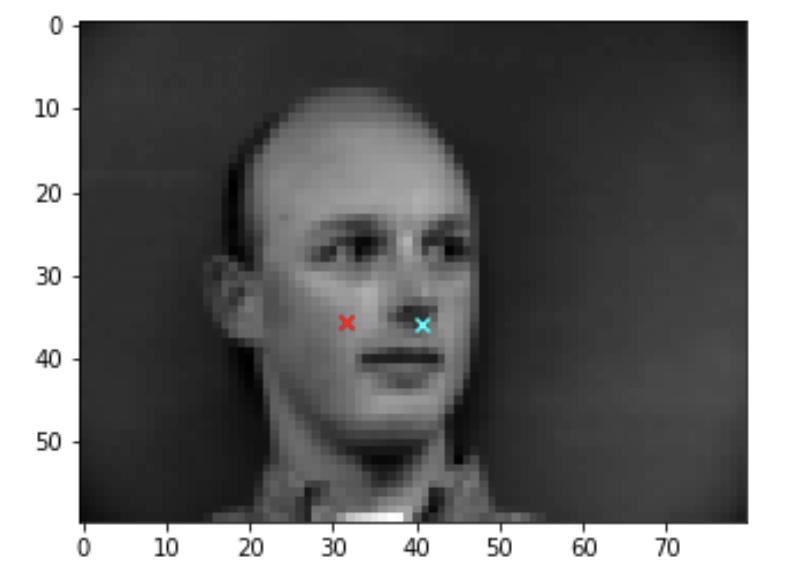
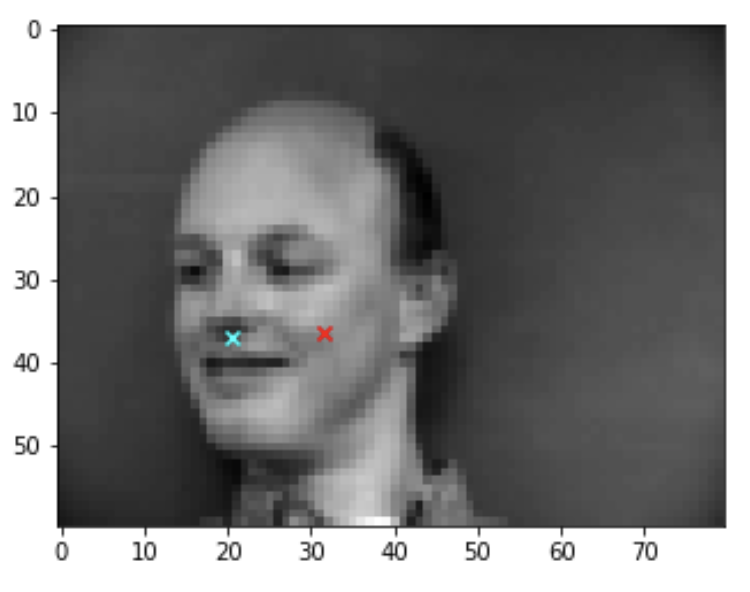
I think the network does worse on these images because of the position of the face. It may also be possible that the network is overfitting to the training data and memorizing each of the nose locations in the training set. I think with more data augmentation, the network might become better at understanding different face orientations.
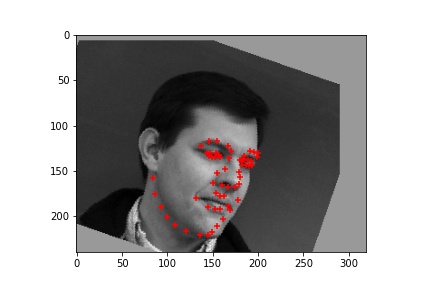
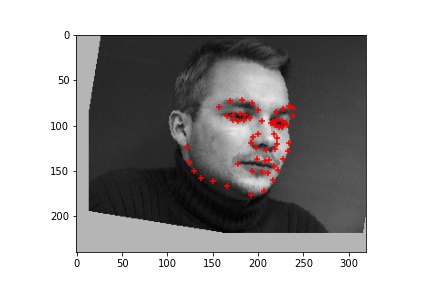
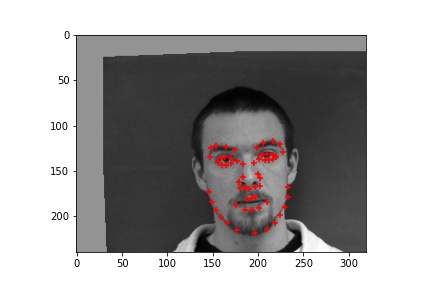
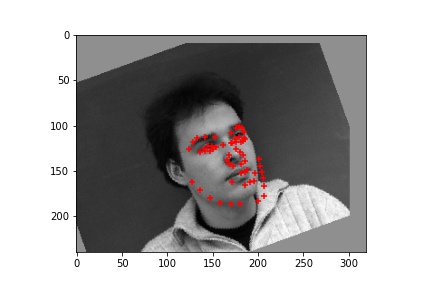
For this section, I tried to build a neural network that would detect all of the facial keypoints from IMM dataset. Each image is converted to grayscale, normalized, and scaled to 240x320. Moreover, I performed two data augmentation techniques. First, I applied a random rotation to each image as it is sampled from the dataloader (angle between -20 and 20 degrees). I also added a random translation (up to 10% of the image size).
Here are a few sample images:
Here are the 4 architectures I tested out. Each one has 6 convolutional layers followed by two fully connected layers.
Network 1
(conv1): Conv2d(1, 12, kernel_size=(3, 3), stride=(1, 1))
(pool1): Identity()
(conv2): Conv2d(12, 12, kernel_size=(3, 3), stride=(1, 1))
(pool2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv3): Conv2d(12, 24, kernel_size=(3, 3), stride=(1, 1))
(pool3): Identity()
(conv4): Conv2d(24, 24, kernel_size=(3, 3), stride=(1, 1))
(pool4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv5): Conv2d(24, 48, kernel_size=(3, 3), stride=(1, 1))
(pool5): Identity()
(conv6): Conv2d(48, 48, kernel_size=(3, 3), stride=(1, 1))
(pool6): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(fc1): Linear(in_features=44928, out_features=1000, bias=True)
(fc2): Linear(in_features=1000, out_features=116, bias=True)
)
Network 2
(conv1): Conv2d(1, 32, kernel_size=(3, 3), stride=(1, 1))
(pool1): Identity()
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1))
(pool2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv3): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1))
(pool3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv4): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1))
(pool4): Identity()
(conv5): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1))
(pool5): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv6): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1))
(pool6): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(fc1): Linear(in_features=52224, out_features=1000, bias=True)
(fc2): Linear(in_features=1000, out_features=116, bias=True)
)
Network 3
(conv1): Conv2d(1, 8, kernel_size=(3, 3), stride=(1, 1))
(pool1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv2): Conv2d(8, 16, kernel_size=(3, 3), stride=(1, 1))
(pool2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv3): Conv2d(16, 32, kernel_size=(3, 3), stride=(1, 1))
(pool3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv4): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1))
(pool4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1))
(pool5): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv6): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1))
(pool6): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(fc1): Linear(in_features=768, out_features=1000, bias=True)
(fc2): Linear(in_features=1000, out_features=116, bias=True)
)
Network 4
(conv1): Conv2d(1, 32, kernel_size=(3, 3), stride=(1, 1))
(pool1): Identity()
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1))
(pool2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv3): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1))
(pool3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv4): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1))
(pool4): Identity()
(conv5): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1))
(pool5): Identity()
(conv6): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1))
(pool6): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(fc1): Linear(in_features=59904, out_features=1000, bias=True)
(fc2): Linear(in_features=1000, out_features=116, bias=True)
)
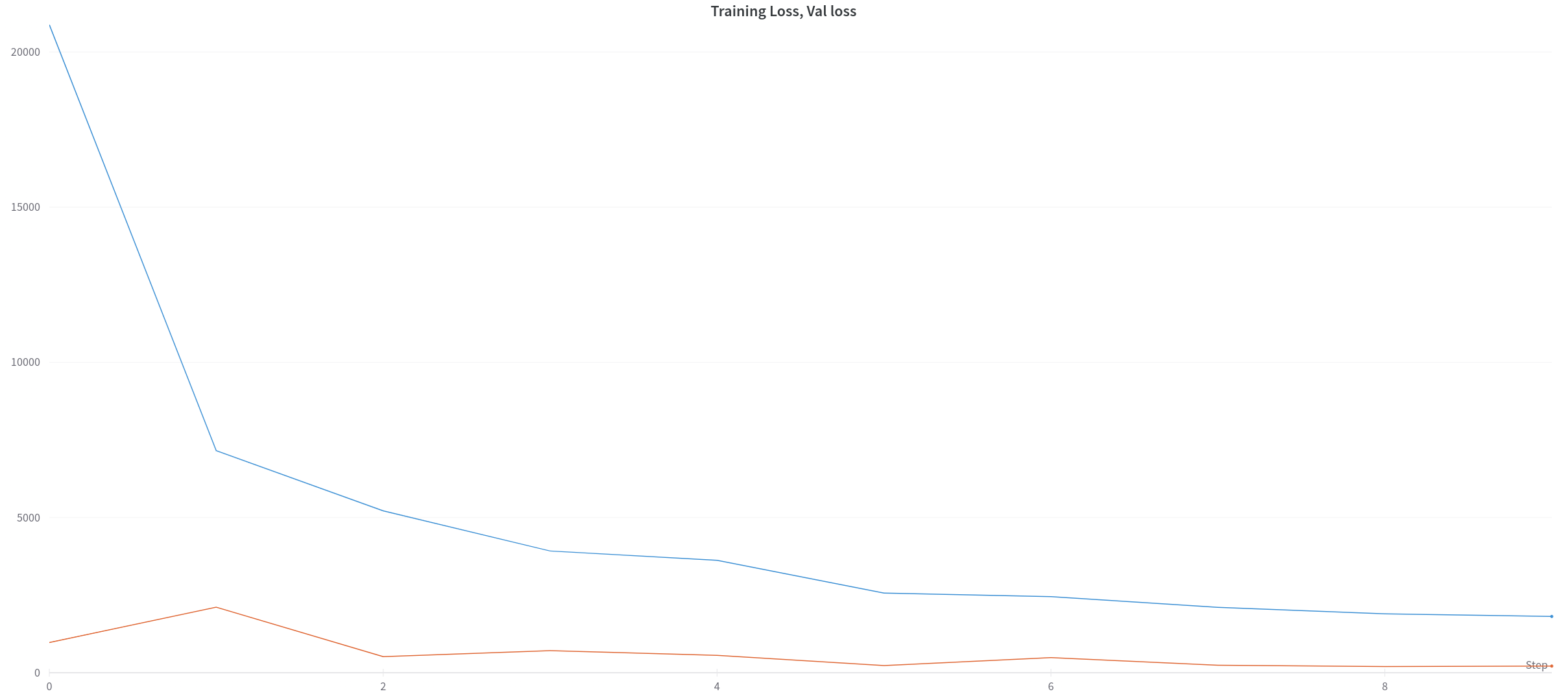
Again, I used the Adam optimizer and MSError. The model with the best validation accuracy was Network 3, with a learning rate of 0.001. Here is the training (blue) and validation loss (orange):

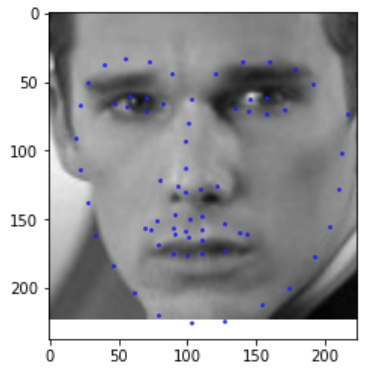
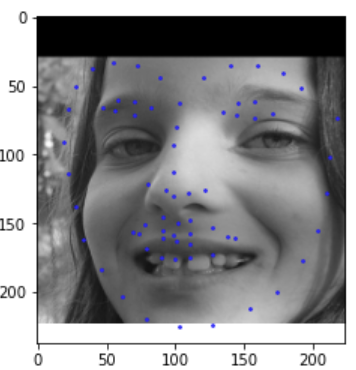
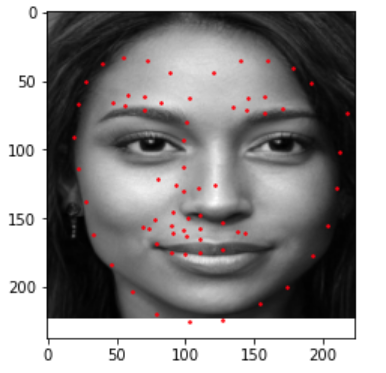
Here are some images it does well on: Red is ground truth and blue is predicted
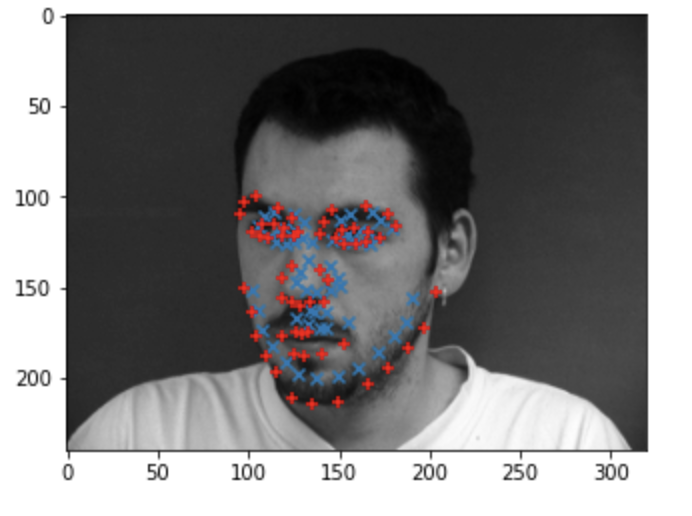
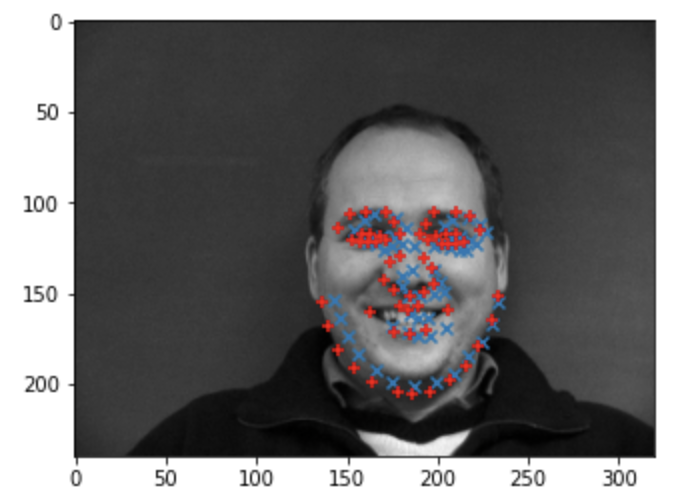
Here are some images it does poorly on:
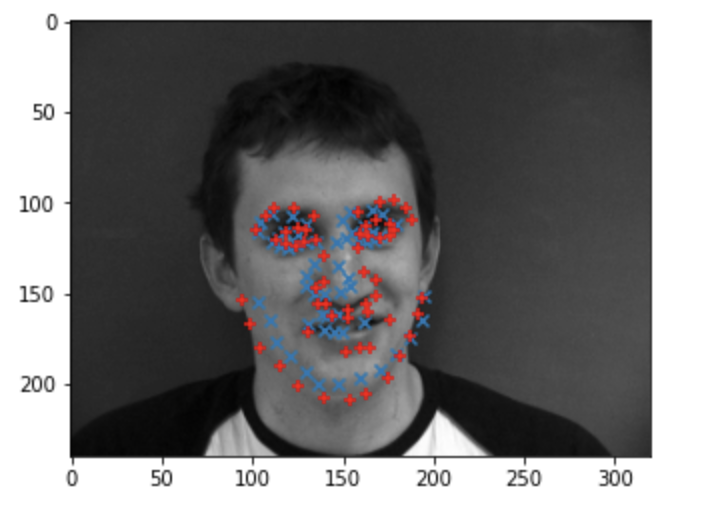
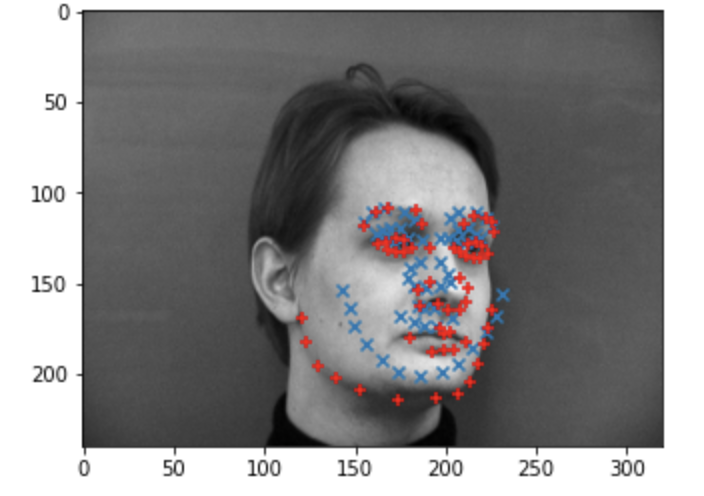
I think this might be a potential issue of overfitting to biases in the data. It seems that the model does well with faces that are well posed and facing the camera but any amount of movement throws it off. Since the majority of the faces of the dataset are primarily forward, the network is reinforcing the bias. To solve this, more augmentation should be performed.
Here are the filters of the first conv layer visualized:
For this portion of the assignment, I started off by building on ResNet-18. Compared to ResNet-18, I made two changes. First, I switched the initial conv1 layer to a input channel of 1 instead of 3. Second, instead of 1000 dimensional output vector (used for ImageNet), I switched it to a 136 (68 x 2 predicted values). Instead of training ResNet-18 from scratch, I started with a pertained model. The only weights I didn't use were the conv1 weights and fully connected layer's weights. I tried the untrained network and it does worse on the validation set when compared to the pretrained one. I'm not sure why but it might be because the variety of ImageNet allows a wider range of features to be detected.
For the data, I cropped each image according to the bounding box. For landmarks that fell outside the bounding box, I placed them on the boundary. I.e. if one landmark was at -1, 0 relative to the bounding box, it is replaced with 0,0. The other borders are similar. For data augmentation, I did a random rotation of -20 to 20 degrees and a random translation by 10%. The training batch size is 64. Finally, I split the whole dataset into a validation (20%) and training set (80%) randomly. For training, the Adam optimizer (lr=0.001) and MSError are used. Training occurred for 10 epochs.
Here is a printout of the ResNet-18 network:
ResNet(
(conv1): Conv2d(1, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer2): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer3): Sequential(
(0): BasicBlock(
(conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer4): Sequential(
(0): BasicBlock(
(conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Sequential(
(0): Linear(in_features=512, out_features=136, bias=True)
(1): ReshapeLayer()
)
)
I have my own GPU, so I decided to try a much larger network. For the second network I used InceptionV3 from PyTorch's modelzoo. Again, I used the pretrained weights and fine tuned. The first conv layer and the last fully connected layer was replaced with the only change being the input channels being 1 and the output of the fc layer as 136 (68 * 2). I also tried training from scratch and using all the color channels. Neither change was able to beat InceptionV3 based on the grayscale images. The full network printout is at the end of the report.
Here is the training (blue) and validation (orange) graph:
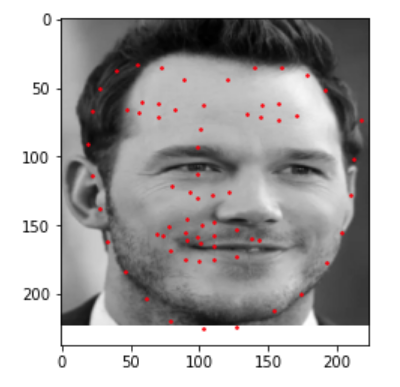
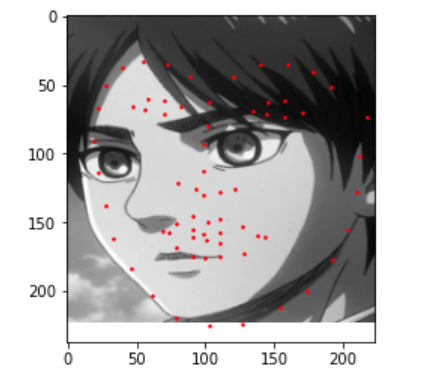
Here are some example results from the test set.



I tried my model on a few different images from the internet but it doesn't seem to do well at all. I think this is a result of the cropping. I think the model is very brittle and is not tolerant of any changes in the input. Unfortunately, I ran out of time before fully investigating the issue. I am a little worried the network is performing some form of memorization but, in terms of validation and test score, it seems to still do well.
I learned a lot about training neural networks. This project was very helpful for solidifying the practical aspects of training a network from scratch. I also learned about tracking experiments; I hadn't used WandB before this project and found it incredibly useful. Moreover, most of my prior experience was with TensorFlow so it was great to also get familiar with PyTorch in a hands-on way.
Inception3(
(Conv2d_1a_3x3): BasicConv2d(
(conv): Conv2d(1, 32, kernel_size=(3, 3), stride=(2, 2), bias=False)
(bn): BatchNorm2d(32, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(Conv2d_2a_3x3): BasicConv2d(
(conv): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(Conv2d_2b_3x3): BasicConv2d(
(conv): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(maxpool1): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
(Conv2d_3b_1x1): BasicConv2d(
(conv): Conv2d(64, 80, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(80, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(Conv2d_4a_3x3): BasicConv2d(
(conv): Conv2d(80, 192, kernel_size=(3, 3), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(maxpool2): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
(Mixed_5b): InceptionA(
(branch1x1): BasicConv2d(
(conv): Conv2d(192, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch5x5_1): BasicConv2d(
(conv): Conv2d(192, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(48, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch5x5_2): BasicConv2d(
(conv): Conv2d(48, 64, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_1): BasicConv2d(
(conv): Conv2d(192, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_2): BasicConv2d(
(conv): Conv2d(64, 96, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(96, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_3): BasicConv2d(
(conv): Conv2d(96, 96, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(96, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch_pool): BasicConv2d(
(conv): Conv2d(192, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(Mixed_5c): InceptionA(
(branch1x1): BasicConv2d(
(conv): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch5x5_1): BasicConv2d(
(conv): Conv2d(256, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(48, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch5x5_2): BasicConv2d(
(conv): Conv2d(48, 64, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_1): BasicConv2d(
(conv): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_2): BasicConv2d(
(conv): Conv2d(64, 96, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(96, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_3): BasicConv2d(
(conv): Conv2d(96, 96, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(96, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch_pool): BasicConv2d(
(conv): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(Mixed_5d): InceptionA(
(branch1x1): BasicConv2d(
(conv): Conv2d(288, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch5x5_1): BasicConv2d(
(conv): Conv2d(288, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(48, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch5x5_2): BasicConv2d(
(conv): Conv2d(48, 64, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_1): BasicConv2d(
(conv): Conv2d(288, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_2): BasicConv2d(
(conv): Conv2d(64, 96, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(96, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_3): BasicConv2d(
(conv): Conv2d(96, 96, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(96, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch_pool): BasicConv2d(
(conv): Conv2d(288, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(Mixed_6a): InceptionB(
(branch3x3): BasicConv2d(
(conv): Conv2d(288, 384, kernel_size=(3, 3), stride=(2, 2), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_1): BasicConv2d(
(conv): Conv2d(288, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_2): BasicConv2d(
(conv): Conv2d(64, 96, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(96, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_3): BasicConv2d(
(conv): Conv2d(96, 96, kernel_size=(3, 3), stride=(2, 2), bias=False)
(bn): BatchNorm2d(96, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(Mixed_6b): InceptionC(
(branch1x1): BasicConv2d(
(conv): Conv2d(768, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7_1): BasicConv2d(
(conv): Conv2d(768, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7_2): BasicConv2d(
(conv): Conv2d(128, 128, kernel_size=(1, 7), stride=(1, 1), padding=(0, 3), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7_3): BasicConv2d(
(conv): Conv2d(128, 192, kernel_size=(7, 1), stride=(1, 1), padding=(3, 0), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_1): BasicConv2d(
(conv): Conv2d(768, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_2): BasicConv2d(
(conv): Conv2d(128, 128, kernel_size=(7, 1), stride=(1, 1), padding=(3, 0), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_3): BasicConv2d(
(conv): Conv2d(128, 128, kernel_size=(1, 7), stride=(1, 1), padding=(0, 3), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_4): BasicConv2d(
(conv): Conv2d(128, 128, kernel_size=(7, 1), stride=(1, 1), padding=(3, 0), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_5): BasicConv2d(
(conv): Conv2d(128, 192, kernel_size=(1, 7), stride=(1, 1), padding=(0, 3), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch_pool): BasicConv2d(
(conv): Conv2d(768, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(Mixed_6c): InceptionC(
(branch1x1): BasicConv2d(
(conv): Conv2d(768, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7_1): BasicConv2d(
(conv): Conv2d(768, 160, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7_2): BasicConv2d(
(conv): Conv2d(160, 160, kernel_size=(1, 7), stride=(1, 1), padding=(0, 3), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7_3): BasicConv2d(
(conv): Conv2d(160, 192, kernel_size=(7, 1), stride=(1, 1), padding=(3, 0), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_1): BasicConv2d(
(conv): Conv2d(768, 160, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_2): BasicConv2d(
(conv): Conv2d(160, 160, kernel_size=(7, 1), stride=(1, 1), padding=(3, 0), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_3): BasicConv2d(
(conv): Conv2d(160, 160, kernel_size=(1, 7), stride=(1, 1), padding=(0, 3), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_4): BasicConv2d(
(conv): Conv2d(160, 160, kernel_size=(7, 1), stride=(1, 1), padding=(3, 0), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_5): BasicConv2d(
(conv): Conv2d(160, 192, kernel_size=(1, 7), stride=(1, 1), padding=(0, 3), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch_pool): BasicConv2d(
(conv): Conv2d(768, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(Mixed_6d): InceptionC(
(branch1x1): BasicConv2d(
(conv): Conv2d(768, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7_1): BasicConv2d(
(conv): Conv2d(768, 160, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7_2): BasicConv2d(
(conv): Conv2d(160, 160, kernel_size=(1, 7), stride=(1, 1), padding=(0, 3), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7_3): BasicConv2d(
(conv): Conv2d(160, 192, kernel_size=(7, 1), stride=(1, 1), padding=(3, 0), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_1): BasicConv2d(
(conv): Conv2d(768, 160, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_2): BasicConv2d(
(conv): Conv2d(160, 160, kernel_size=(7, 1), stride=(1, 1), padding=(3, 0), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_3): BasicConv2d(
(conv): Conv2d(160, 160, kernel_size=(1, 7), stride=(1, 1), padding=(0, 3), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_4): BasicConv2d(
(conv): Conv2d(160, 160, kernel_size=(7, 1), stride=(1, 1), padding=(3, 0), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_5): BasicConv2d(
(conv): Conv2d(160, 192, kernel_size=(1, 7), stride=(1, 1), padding=(0, 3), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch_pool): BasicConv2d(
(conv): Conv2d(768, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(Mixed_6e): InceptionC(
(branch1x1): BasicConv2d(
(conv): Conv2d(768, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7_1): BasicConv2d(
(conv): Conv2d(768, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7_2): BasicConv2d(
(conv): Conv2d(192, 192, kernel_size=(1, 7), stride=(1, 1), padding=(0, 3), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7_3): BasicConv2d(
(conv): Conv2d(192, 192, kernel_size=(7, 1), stride=(1, 1), padding=(3, 0), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_1): BasicConv2d(
(conv): Conv2d(768, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_2): BasicConv2d(
(conv): Conv2d(192, 192, kernel_size=(7, 1), stride=(1, 1), padding=(3, 0), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_3): BasicConv2d(
(conv): Conv2d(192, 192, kernel_size=(1, 7), stride=(1, 1), padding=(0, 3), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_4): BasicConv2d(
(conv): Conv2d(192, 192, kernel_size=(7, 1), stride=(1, 1), padding=(3, 0), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7dbl_5): BasicConv2d(
(conv): Conv2d(192, 192, kernel_size=(1, 7), stride=(1, 1), padding=(0, 3), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch_pool): BasicConv2d(
(conv): Conv2d(768, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(AuxLogits): None
(Mixed_7a): InceptionD(
(branch3x3_1): BasicConv2d(
(conv): Conv2d(768, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3_2): BasicConv2d(
(conv): Conv2d(192, 320, kernel_size=(3, 3), stride=(2, 2), bias=False)
(bn): BatchNorm2d(320, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7x3_1): BasicConv2d(
(conv): Conv2d(768, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7x3_2): BasicConv2d(
(conv): Conv2d(192, 192, kernel_size=(1, 7), stride=(1, 1), padding=(0, 3), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7x3_3): BasicConv2d(
(conv): Conv2d(192, 192, kernel_size=(7, 1), stride=(1, 1), padding=(3, 0), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch7x7x3_4): BasicConv2d(
(conv): Conv2d(192, 192, kernel_size=(3, 3), stride=(2, 2), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(Mixed_7b): InceptionE(
(branch1x1): BasicConv2d(
(conv): Conv2d(1280, 320, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(320, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3_1): BasicConv2d(
(conv): Conv2d(1280, 384, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3_2a): BasicConv2d(
(conv): Conv2d(384, 384, kernel_size=(1, 3), stride=(1, 1), padding=(0, 1), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3_2b): BasicConv2d(
(conv): Conv2d(384, 384, kernel_size=(3, 1), stride=(1, 1), padding=(1, 0), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_1): BasicConv2d(
(conv): Conv2d(1280, 448, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(448, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_2): BasicConv2d(
(conv): Conv2d(448, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_3a): BasicConv2d(
(conv): Conv2d(384, 384, kernel_size=(1, 3), stride=(1, 1), padding=(0, 1), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_3b): BasicConv2d(
(conv): Conv2d(384, 384, kernel_size=(3, 1), stride=(1, 1), padding=(1, 0), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch_pool): BasicConv2d(
(conv): Conv2d(1280, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(Mixed_7c): InceptionE(
(branch1x1): BasicConv2d(
(conv): Conv2d(2048, 320, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(320, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3_1): BasicConv2d(
(conv): Conv2d(2048, 384, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3_2a): BasicConv2d(
(conv): Conv2d(384, 384, kernel_size=(1, 3), stride=(1, 1), padding=(0, 1), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3_2b): BasicConv2d(
(conv): Conv2d(384, 384, kernel_size=(3, 1), stride=(1, 1), padding=(1, 0), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_1): BasicConv2d(
(conv): Conv2d(2048, 448, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(448, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_2): BasicConv2d(
(conv): Conv2d(448, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_3a): BasicConv2d(
(conv): Conv2d(384, 384, kernel_size=(1, 3), stride=(1, 1), padding=(0, 1), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch3x3dbl_3b): BasicConv2d(
(conv): Conv2d(384, 384, kernel_size=(3, 1), stride=(1, 1), padding=(1, 0), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch_pool): BasicConv2d(
(conv): Conv2d(2048, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(dropout): Dropout(p=0.5, inplace=False)
(fc): Sequential(
(0): Linear(in_features=2048, out_features=136, bias=True)
(1): ReshapeLayer()
)
)