1. Detecting corner features in an image:
Here are the results of using the Harris Interest Point Detector on my images.
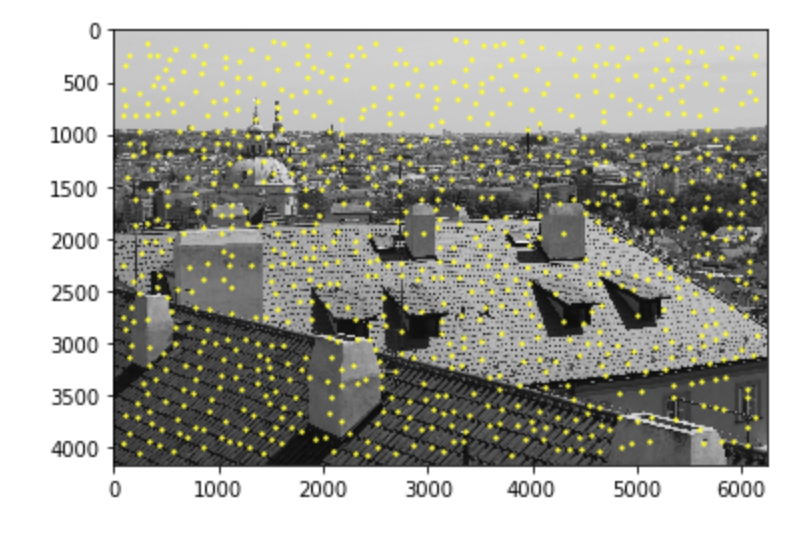
Here are the results of using the Harris Interest Point Detector on my images.
In order to extract feature descriptors, I loop through the corners of an image and create 40x40 patches. I then resize it to 8x8 and normalize it. I finally return a list of all these descriptors. I do so for each image.
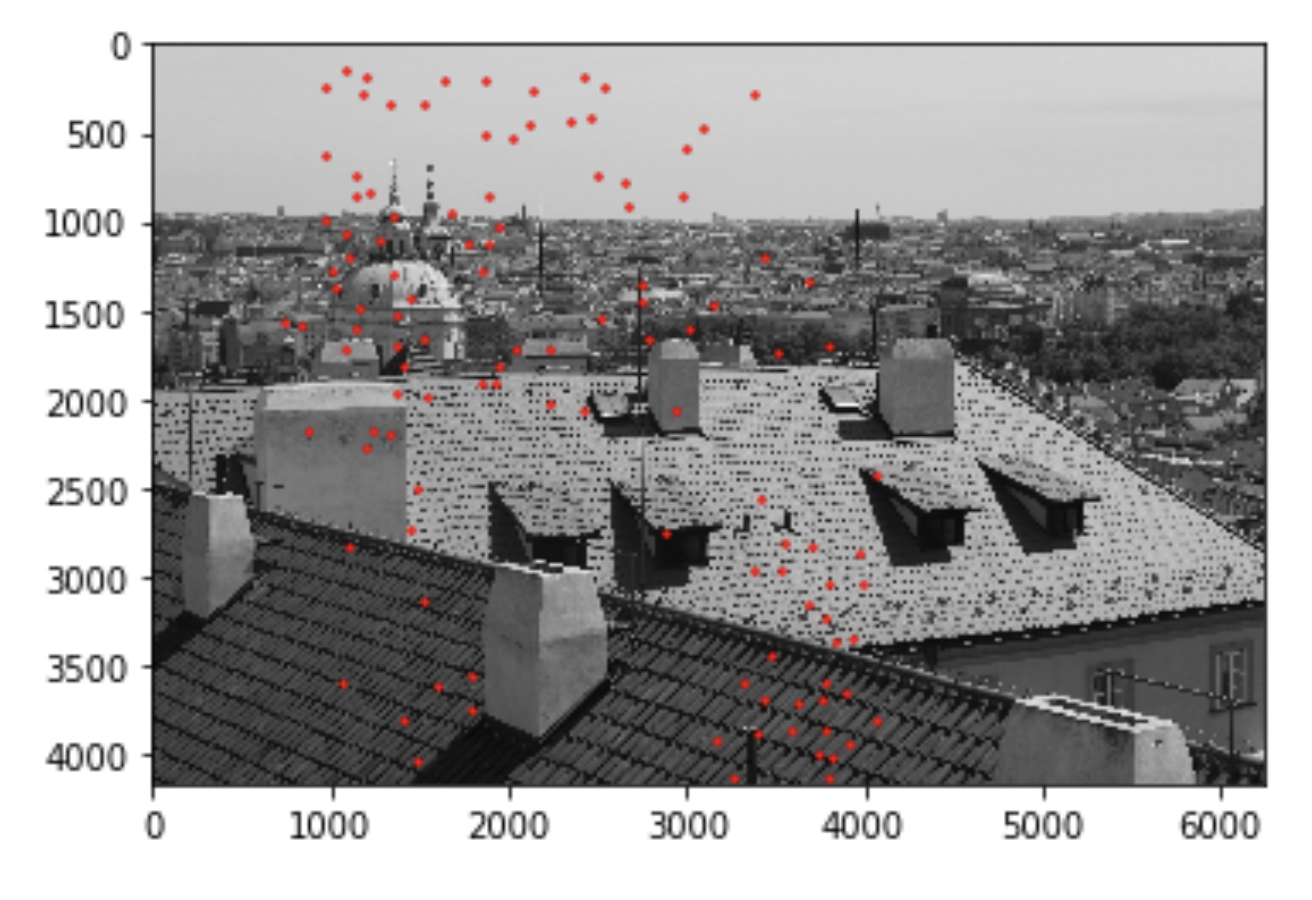
In order to match the feature descriptors, I calculate the distance between each pair of descriptors and if the fraction of the lowest two errors is smaller than 0.6 then I add this pair to my list of matchings.
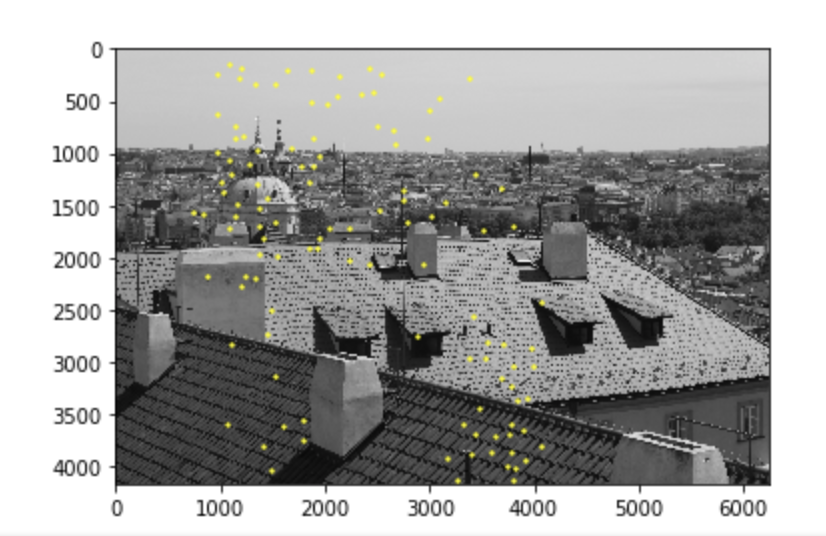
After implementing the RANSAC algorithm, I got this homography matrix H:
