

By Alex Kassil (cs194-26-aca)
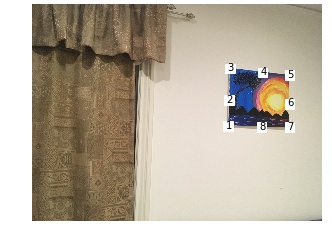
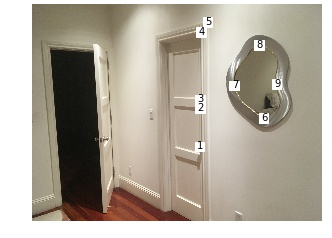
I took photos of a painting on my wall, inside a room, and the stairwell




Already noticle is a weird green tint from my photographs, this will cause issues later one
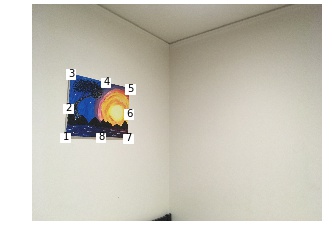
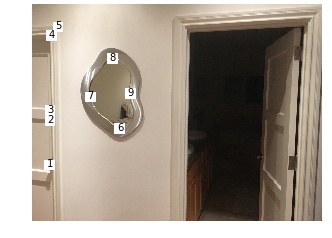
Lets label some points! Just like project 3
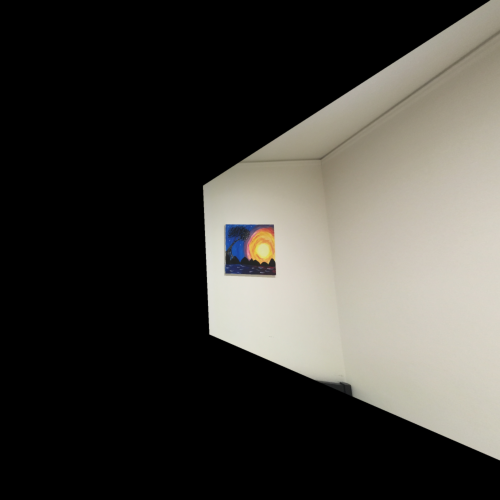
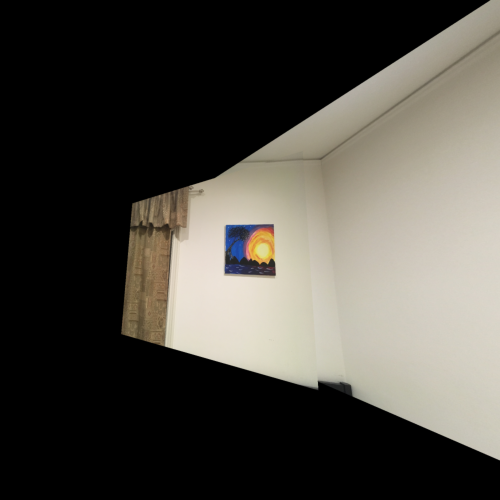
Once I computed the points and created the homography function, I can now compute the delaunay triangula... I mean rectify an image and recover the whole painting by finding the homography between it and the unit square, which I did for the two paintings, because who doesn't love art?
I used inverse warping to create images that look quite clean


Now I have everything I need to warp to create a mosaic. Lets try to warp the painting of a sunset photos to have a mosaic with a rectified painting
First lets warp the images, and find a nice border for both of them to fit

Now add together the photos!

Oh no, that looks not write, super bright in the overlap region.
What happends if we overlap painting2 over painting1 or the other way around?
These look much better, but you can see some lines streaking
Let us try feathering! Apply some masks, then combine!
Compared to featherine, I think overwriting actually looks nicer
More mosaics!

I wish I could go outside and not just take pictures inside my house :/
SO MUCH! Woah writing a vectorized warp function took SO LONG. And it was sooo fast, and quite elegant in the end. Adding points manually isn't too bad, and can lead to some really nice results. Another thing that made my warp waaay faster way using np.where to get index that wasn't out of bounds, that was a key insight that allowed me to vectorize my code
I used the provided harris corner detection code to find some corners
Then after reading the ANMS section many times, as well as looking at other webpages, I finally understood it. The point is to compute pairwise distances between each point, and then find the nearest point that is greater harris value than you, that is your score. Score of global max is infinity, and then sort by score and return top n. Returning top 500 worked for me.
Here you can see it finding really intersting points like corner of paintings and other things like that
Using feature detection I could find pair up points between the two images
And finally RANSAC provides with robust pairs and removes the outliers
Below are the original manual warps on the left, ransac on the right


Difference in quality is quite similar, but the difference in work is no manual labeling!
It was amazing in the end to have one ransac function that just took images and produced the final mosaic. That felt like something that could be a polished part of a camera app on a phone. Testing your code on small examples is important, and turning snippets into functions into bigger functions is crucial. I learned how one computer and one programmer together with a few photos can do quite some cool stuff.