Project SIXT33N
It’s time to show the world what you’ve learned in the EE16 series! For the final project you (and your partner) will gather all that knowledge and skill to build a flavor of the SIXT33N robot (no, we’re not leets. Read: 6T3-3N).
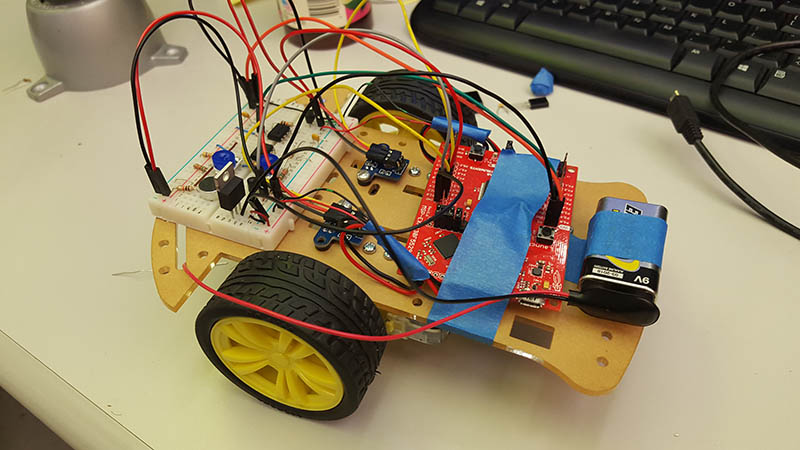
The SIXT33N is a mobile robot on 3 wheels (2 drivable) that moves around according to some input. It uses the MSP430 Launchpad as its guts with some circuitry for driving the motor and sensing through a microphone. It also runs on a 9V battery, so you don’t have to chase it around as it moves. There are 2 different flavors of the project, each described below:
Version A: Music Recognition
In this version, the SIXT33N will recognize two different genres of music. SIXT33N will turn, drive forwards, and change speeds, depending on the genre and loudness of the music that it hears.
Version B: Speech Recognition
This version of SIXT33N will recognize 4 different voice commands. It will then move forward, left or right based on those commands.
The version that you choose is up to you! Both versions have a similar amount of work, and have three main sub parts: circuits, PCA, and controls. For the first two weeks, half of your team will work on the microphone front end circuit, and the other half will work on the PCA classification. In the third week, one person from each group will work on integrating the front end circuit with the classification, and the rest of the team will begin implementing the controls. Finally, you will bring it all together into one glorious machine.
The timeline for the project is roughly as follows:
| Date | Circuits Group | PCA Group |
|---|---|---|
| 03/28 | Microphone Front End | PCA Classification |
| 04/04 | ||
| 04/11 | Processing Integration | Controls |
| 04/18 | ||
| 04/25 | Final Integration | |
| 05/02 | Demo | |
Even though most of the phases span 2 weeks, we will have checkpoints every week so each group is progressing together. These checkpoints will be clearly labeled in the iPython Notebooks. The checkpoint for week 1 is due in the beginning of your lab in week 2. Each checkpoint is worth 5 points, and late checkpoints are worth 4 points. On top of these checkpoints, there is a short final writeup detailed in the last iPython Notebook.
| Phase | Checkpoints |
|---|---|
| Circuits |
Week 1: Circuit schematic agreed by GSI Week 2: Working microphone front end circuit |
| Data Processing (PCA) |
Week 1: First pass through PCA with sample data; GSI feedback Week 2: Classification target met in Python |
| Controls |
Week 1: Open loop parameters gathered, derived method to set desired eigenvalues, plan for turning Week 2: Car drives straight and turns |
| Processing Integration |
Week 1: Take new data and run through PCA, show GSI results in Python Week 2: Classification reasonably accurate in Launchpad / LEDs responding to input |
| Final Integration | The final product! |
This project is meant to give you design experience and creative control. Once you have implemented the basics version of SIXT33N, we encourage innovation. Any project that goes beyond the requirements will receive extra credit!
| Phase | Version A: Music | Version B: Speech | |
|---|---|---|---|
| 1 | Mic Front End and Signal Processing |
|
|
| 2 | Data Processing |
|
|
| 3 | Processing Integration |
|
|
| 4 | Controls |
|
|
| 5 | Integration |
|
|