CS188: Spring
2007
Assignment 2:
Search Project and CSP
Due 2/12/2007 at 11:59pm
This assignment has two parts. The first part asks you to implement
uninformed and heuristic search algorithms in different simple domains. The code
for this project consists of several python files that you will need to
understand and modify. The second part of the assignment asks you answer
questions about constraint satisfaction problems. Both parts are due on 2/12 at
11:59 PM. Please follow the submission
instructions and use “submit hw2” to submit
this assignment. More detailed instructions are included in the
individual questions.
This assignment should be done individually; future assignments may be done in pairs.
Part
1: Search Project (20 Points)
A lone adventurer, the brave SearchAgent,
forges eastward through the mountains with nothing but a map and her
algorithmic savvy. Only by a thorough search of her map will she reach her
destination without wasting steps.
Introduction
While future projects will tackle realistic present day AI
applications, this one focuses on two classic domains in the artificial
intelligence community: mazes and the 8-puzzle. After some brief
exercises to help familiarize you with Python and the provided code base, the
project will consist of building general search algorithms and then applying
them to multiple domains. If you are unfamiliar with Python, you might
want to work through the Python
tutorial before this project.
The code for this project consists of several Python files which
you will need to understand in order to complete the assignment. You can
download the code and supporting files as a tar.gz archive.
|
Code for constructing, editing, displaying and searching mazes
(Part 1.A). |
|
|
Generic search algorithm code (Part 1.A). All your search
agents will implement the |
|
|
Useful data structures for implementing search algorithms
(Part 1.A). |
|
|
Code for constructing, editing, displaying and searching
8-puzzles (Part 1.B). You will implement the EightPuzzleSearchProblem
class and two heuristic functions. |
What to submit: You will edit portions of search.py and eightpuzzle.py during
the assignment. You should submit them along with a
text or pdf file containing
transcripts of your code working and answers to the discussion questions. Directions
for submitting and setting up your account are on the course website.
Part
1.A: Maze World
For the first part of your assignment, you'll be writing search
agents which solve the maze search problem. The
relevant code is in mazeworld.py.
A maze is represented as a 2-d grid with a start position 'S' and exit 'E'.
There are also obstacles '#' that are impassable and water '~' which is
passable but expensive (5 times the step cost of moving through a blank
square). For example:
---- |# | |~S E| ----
To
create this simple maze, you can type:
>>> import mazeworld
>>> simpleMaze = mazeworld.Maze([['#', ' ', ' ', ' '],
['~', 'S', ' ', 'E']])
>>> print simpleMaze
The
simplest agent in this domain simply moves right until she finds the exit or
hits an obstacle and gives up. This simple agent, SimpleMazeAgent,
is provided in mazeworld.py. This agent can find a
path through our simple maze.
>>> simpleMazeAgent = mazeworld.SimpleMazeAgent()
>>> mazeworld.testAgentOnMaze(simpleMazeAgent, simpleMaze)
Solution cost: 2.0
Number of nodes expanded: 2
Number of unique nodes expanded: 2
You
can also see a visualization of the maze solution by passing an optional verbose =True to
testAgentOnMaze .
Question
1 (1 point) Write a function that creates the simple
maze above and then edits it
such that the simple right-moving agent cannot reach the exit. Now, write a
maze agent that can solve your new maze (hard-coding a sequence of moves is
fine). You need only submit a transcript
of the output for this question.
Now that you've
gotten your feet wet, it's time to write full-fledged generic search agents!
Question
2 (3 points) Implement the depth-first search (DFS)
algorithm in the DepthFirstSearchAgent
class in search.py.
Make your algorithm complete, for example by checking for cycles in the search
path (Section 3.5). Test your code on the maze in maze1.txt as follows:
>>> maze1 = mazeworld.readMazeFromFile('maze1.txt')
>>> import search
>>> agent = search.DepthFirstSearchAgent()
>>> mazeworld.testAgentOnMaze(agent,maze1,verbose=True)
What is the cost of the solution found by your depth first
search agent? Is this the lowest cost solution? If not, what is depth-first
search doing wrong?
Question
3 (3 points) Implement the breadth-first search
(BFS) algorithm in the BreadthFirstSearchAgent
class in search.py.
This time, write a graph search algorithm that avoids expanding any already
visited states (section 3.5). Test your code on the maze in maze1.txt the
same way you did for depth-firstsearch (except of
course instantiating your BFS agent instead of your DFS agent). Does your BFS
search agentfind the best solution.
Now test your BFS agent on maze2.txt. Does your BFS agent findthe
best solution for this maze? If not, what is BFS doing wrong, or failing to do?Does your BFS agent expand a
substantially different number of nodes than your DFS agent?
Question
4 (4 points) Implement the uniform-cost search
algorithm in the UniformCostSearchAgent
class in search.py.
Test your agent on maze2.txt. Does it find the best solution? Now
test your agent on maze3.txt.
How many nodes does it expand in order to get this solution? Looking at the
output, does it seem like the agent is expanding unnecessary nodes? Which nodes
are wasted exploration?
Question 5 (2 points) Implement the A* search
agent in the empty class AStarSearchAgent
in search.py.
You will need to pass a heuristic function into AStarAgent
upon construction. The heuristic function should take two arguments: the
current state and the search problem. Use the manhattanDistance
heuristic function provided in mazeworld.py. Now,
test your A* agent on maze3.txt. How
many nodes does it expand compared to the uniform-cost
search agent you wrote for question 4? Qualitatively, what is different about
the regions explored by the uniform-cost and A* search agents?
Your
agent is on a roll! Try maze_15x15.txt, maze_25x25.txt and maze_35x35.txt
for more fun.
Part 1.B: 8-Puzzle
Upon reaching her goal, SearchAgent happens upon a great computational challenge: the 8-puzzle. Fortunately, her searching abilities make short work of this NP-complete problem.
In
this part of the project, you will use the search agents you wrote in part Aon
a new domain: the 8-puzzle. The 8-puzzle is another straightforward application
of search techniques. The 8-puzzle class and methods to manipulate it are
provided to you in eightpuzzle.py.
However, the puzzle must be formulated as a search problem in order for your
search agent to solve it. Solving the 8-puzzle should not require any changes
to your search agent.
First,
some quick notes on the 8-puzzle implementation. Each instance of the EightPuzzleState
class represents a particular configuration of the puzzle. Once an instance is
created, it should not be changed ( EightPuzzleState is
designed to be an immutable type). Instead, the result function creates a new
instance that represents a different configuration: the result of applying the
provided move to the current configuration.
The
intention of this design is to let instances of the EightPuzzleState
class serve as states for the search algorithms. Thus, you need not create your
own state representation of the 8-puzzle.
Question
6 (3 points) Fill in the missing elements of EightPuzzleSearchProblem so
that the breadth-first search agent can find a solution. Then, test your agent
interactively as follows:
>>> import eightpuzzle
>>> import search
>>> puzzle1 = eightpuzzle.loadEightPuzzle(1)
>>> puzzleProblem1 = eightpuzzle.EightPuzzleSearchProblem(puzzle1)
>>> bfs = search.BreadthFirstSearchAgent()
>>> bfs.solve(puzzleProblem1)
Will
the BFS agent always find the optimal (fewest moves) solution to an 8-puzzle?
Question
7 (4 points) Write the two heuristic functions that
appear in the textbook for this problem: misplaced tiles and
Extra
Credit (2 points) A third heuristic, Gaschnig's heuristic, is derived from the problem
relaxation that a tile can move from a square A to a square B if B is blank (p.
108). Specify this heuristic and find an efficient way to compute it. Implement
the heuristic. How does it compare to the two heuristic functions in question 8
(in terms of A* performance)? Can you quickly write a heuristic function that
is always at least as good as the
Part 2: Constraint Satisfaction
Problems (15 points)
Question 2.1 (5 points).
Consider the following CSP:
Variables: {A, B, C, D}
Domain: {1, 2, 3}
Binary Constraints: A ≠ B, A ≠ C, B > C, B < D
a.
Draw a constraint graph for this problem and write out the
implicit constraints as explicit sets of legal pairs.
b. Assuming an
alphabetical ordering on both variables and values, show the assignments
considered by each step of backtracking DFS with forward checking. After
each assignment, indicate the remaining domains of all unassigned
variables. E.g., completely naive DFS would search A=1, A=1 B=1, A=1 B=1
C=1, A=1 B=1 C=1 D=1, A=1 B=1 C=1 D=2, A=1 B=1 C=1 D=3, then pop back up to A=1
B=1 C=2, and so on, but never remove any values from unassigned domains.
c. Show the assignments
and domains, again with backtracking DFS and forward checking, but now using
the MRV and LCV orderings. (Break MRV ties by the degree heuristic, then
alphabetically; break LCV ties numerically, smaller
values first.) Is this any faster than part (b)? Why or why not?
d. Show the assignments
and domains, again with backtracking DFS and forward checking, using the
original alphabetical ordering, but now using cutset
conditioning, with C as a cutset. Is there a better cutset?
e. Show the assignments
and domains with arc consistency (i.e. AC-3) run as preprocessing at the start
and after each assignment.
Question 2.2 (4 points). In this problem, you will prove that every
general CSP (constraints on arbitrary subsets of variables) canbe
transformed into an equivalent binary CSP (constraints only on pairs of
variables). You should assume that variables have finite
domains. See p. 159 of the textbook for another wording of this problem
(and a hint).
a. First, show how
unary constraints can be eliminated by altering the domains of variables.
b. Show that any
ternary constraint can be transformed into three binary constraints by
introducing a new auxiliary variable.
c. Finally, show how a
similar approach can be used to transform any n-ary
constraint into a set of binary constraints.
d. For n-ary constraints, how many auxiliary variables are
introduced? What are their maximum domain sizes? How many binary constraints
(arcs in the constraint graph) are required?
Question
2.3 (6 points). In
the game of Minesweeper, we would like to determine which squares on a grid
contain mines. At any given time, we have a partially revealed board,
like the one below:
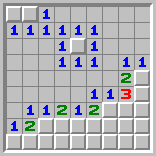
Squares
are either marked as revealed (and therefore clear) or hidden (possibly a mine,
or possibly clear). All revealed squares show the number of adjacent
squares, including diagonals, which have mines (in most programs, zeros are
displayed as blanks). At each step, we select a hidden position to
reveal. We win if we reveal all clear squares without revealing
a mine. We can use CSPs to gather information
about unknown squares for a particular state. You can try a game here.
a. Formulate a CSP
where a solution is an assignment of the hidden squares to {clear, mine} which
is compatible with the observed adjacent mine counts. Assume the number
of remaining mines is unknown.
b. Sometimes we have to
guess. Show a small, simple board configuration for which no hidden
square is guaranteed to be clear, and show the set of solutions to the CSP.
c. Sometimes we can
reason that a certain hidden position is guaranteed to be clear. Show a
small, simple configuration which has more than one solution, but where all
solutions agree that some currently hidden position is clear. Show those
solutions.
d. Why will a standard
CSP solver not directly tell us where to move next?
e. How can we augment
the basic DFS-based backtracking constraint solver to tell us whether or not a
square is guaranteed to be safe?
f. Can we still use
forward checking with the augmented DFS-based backtracking constraint solver
from part e) ? Why or why not? What about
arc consistency?
g. [Extra Credit: 1
point] Show a method for correctly deciding which move is safest when no move
is perfectly safe.