Tractable Cases
Scenario models
Box uncertainty models
Ellipsoidal models
Scenario uncertainty
Uncertainty model
In the scenario uncertainty model, the uncertainty on a coefficient vector  is described by a finite set of points:
is described by a finite set of points:

where each vector  ,
,  corresponds to a particular “scenario”.
corresponds to a particular “scenario”.
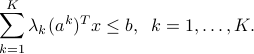
The robust counterpart to a half-space constraint:

can be simply expressed as a set of  affine inequalities:
affine inequalities:

Note that the scenario model actually enforces more than feasibility at the “scenario” points  . In fact, for any that is in the convex hull of the set
. In fact, for any that is in the convex hull of the set  , the robust counterpart holds. Indeed, if the above holds, then for any set of nonnegative weights
, the robust counterpart holds. Indeed, if the above holds, then for any set of nonnegative weights  summing to one, we have
summing to one, we have
With a scenario uncertainty, the robust counterpart to the original LP:

with  ,
,  , becomes
, becomes

This is an LP, with a total of  constraints, where
constraints, where  is the number of elements in the finite set
is the number of elements in the finite set  .
.
The scenario model is attractive for its simplicity. However, the number of scenarios can result in too large a problem.
 |
A robust half-space constraint with scenario uncertainty, with three scenarios. The constraint represents a polyhedron (dark blue). |
Example: Robust LP solution to the drug production problem.
Box uncertainty models
Definition
The box uncertainty model assumes that every coefficient vector  lies in a ‘‘box’’, or more generally, a hyper-rectangle in
lies in a ‘‘box’’, or more generally, a hyper-rectangle in  , but is otherwise unknown. In its simplest case, the uncertainty model has the following form:
, but is otherwise unknown. In its simplest case, the uncertainty model has the following form:

where  is a measure of the size of the uncertainty, and
is a measure of the size of the uncertainty, and  represents a ‘‘nominal’’ vector. This describes a ‘‘box’’ of half-diameter
represents a ‘‘nominal’’ vector. This describes a ‘‘box’’ of half-diameter  around the center .
around the center .
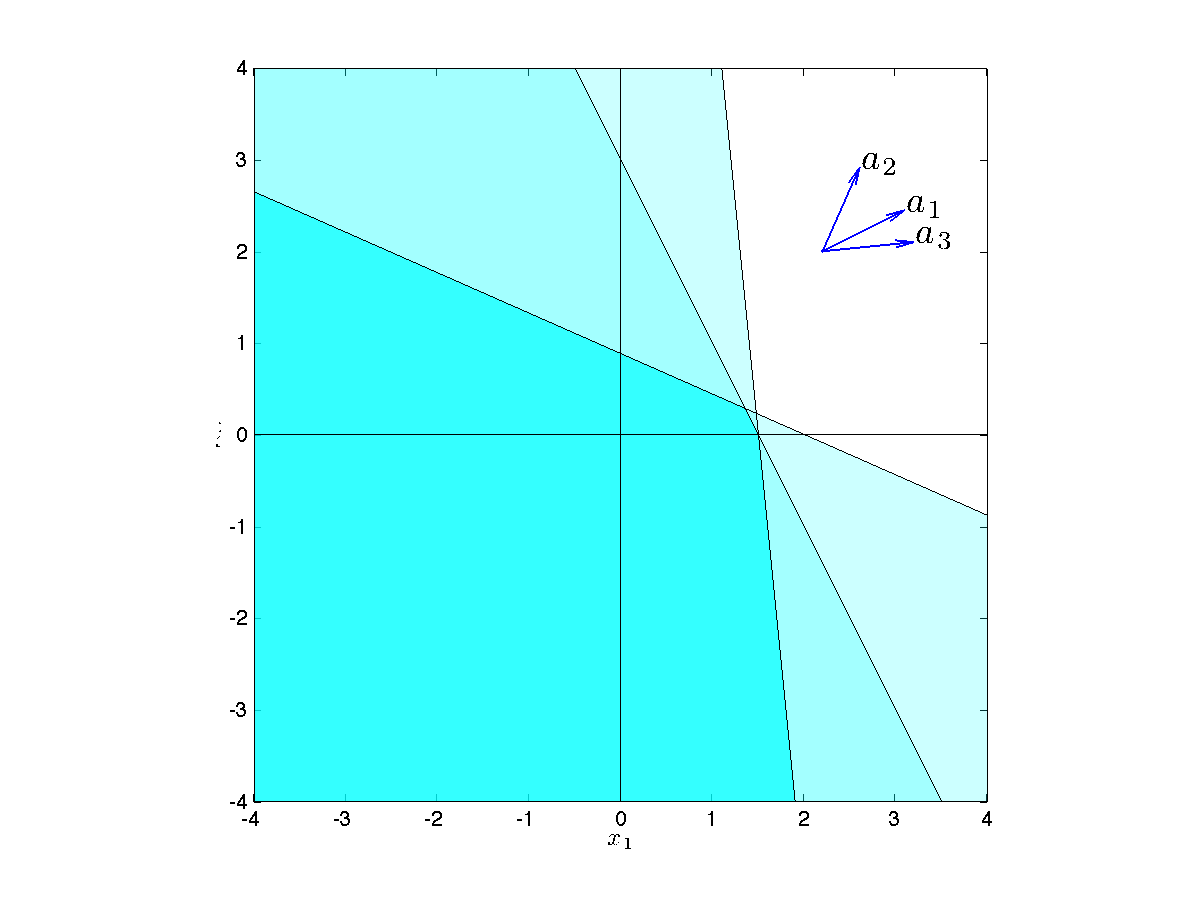
Note that the robust counterpart to a half-space constraint
can be handled as a scenario model, with “scenarios” the vectors  , where
, where  represents one of the
represents one of the  vertices of the unit box (that is, vectors with
vertices of the unit box (that is, vectors with  's as components). Indeed, enforcing the constraint
's as components). Indeed, enforcing the constraint  implies that
implies that  holds for every in the convex hull of the 's, which is precisely the box . This approach is not practical, as there are an exponential number of vertices, hence of constraints, to deal with.
holds for every in the convex hull of the 's, which is precisely the box . This approach is not practical, as there are an exponential number of vertices, hence of constraints, to deal with.
Robust counterpart: LP formulation
The robust counterpart is better handled after one realizes that the robust counterpart constraint above is equivalent to
The maximization problem has a simple form (proof):

 |
A robust half-space constraint with box uncertainty, with different uncertainty levels. Such sets can be described by a finite (but exponential in the dimension) number of inequalities. |
With a box uncertainty model, defined as  , , the robust counterpart to the original LP:
, , the robust counterpart to the original LP:
is also an LP (in polyhedral form)

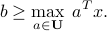
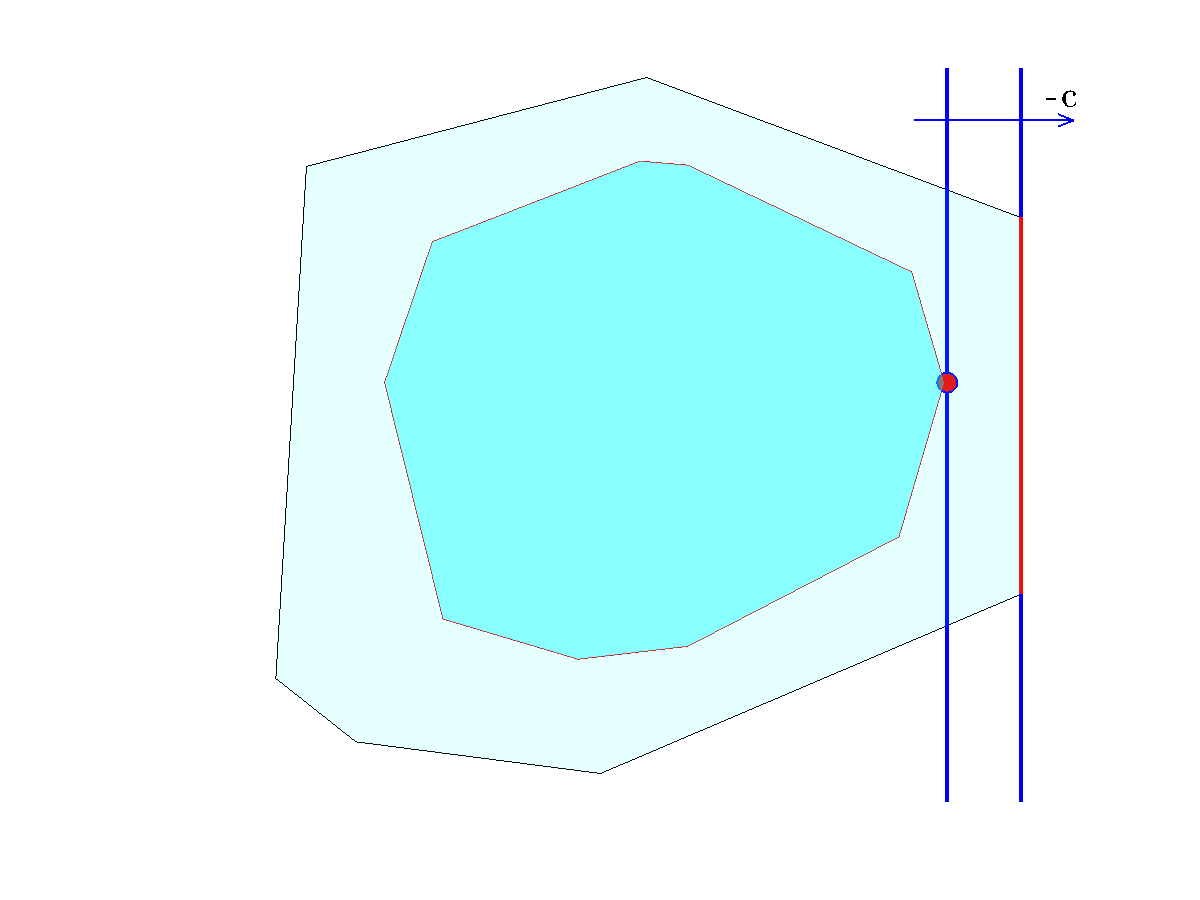 |
A robust LP with box uncertainty. The robust feasible set (darker blue) is inside the feasible set for the nominal LP (lighter blue); both feasible sets are polyhedral. The objective is to minimize |
 , where the vector
, where the vector  is shown. The nominal LP has many optimal points (red line), which means a solution might be very sensitive to data changes (such as if we change the direction of the objective slightly). Although in this case, the roubst LP has a unique solution (red dot), it is still an LP, so it might be sensitive to changes in the objective vector.
is shown. The nominal LP has many optimal points (red line), which means a solution might be very sensitive to data changes (such as if we change the direction of the objective slightly). Although in this case, the roubst LP has a unique solution (red dot), it is still an LP, so it might be sensitive to changes in the objective vector.Ellipsoidal uncertainty
Form of the model
The ellipsoidal uncertainty model has the form

where  is a matrix which describes the “shape” of the ellipsoid around its center, which is . If
is a matrix which describes the “shape” of the ellipsoid around its center, which is . If  for some
for some  , then the above is a simple sphere of radius around ; we refer to this special case as the spherical uncertainty model.
, then the above is a simple sphere of radius around ; we refer to this special case as the spherical uncertainty model.
Ellipsoidal uncertainty models are useful to “couple” uncertainties across different components of the coefficient vector . This is contrast with the previous ‘‘box’’ models, which allow uncertainties to take their largest values independently of each other.
Robust counterpart: SOCP formulation
With an ellipsoidal model the robust counterpart is

where we have exploited the Cauchy-Schwartz inequality. (See also here.)
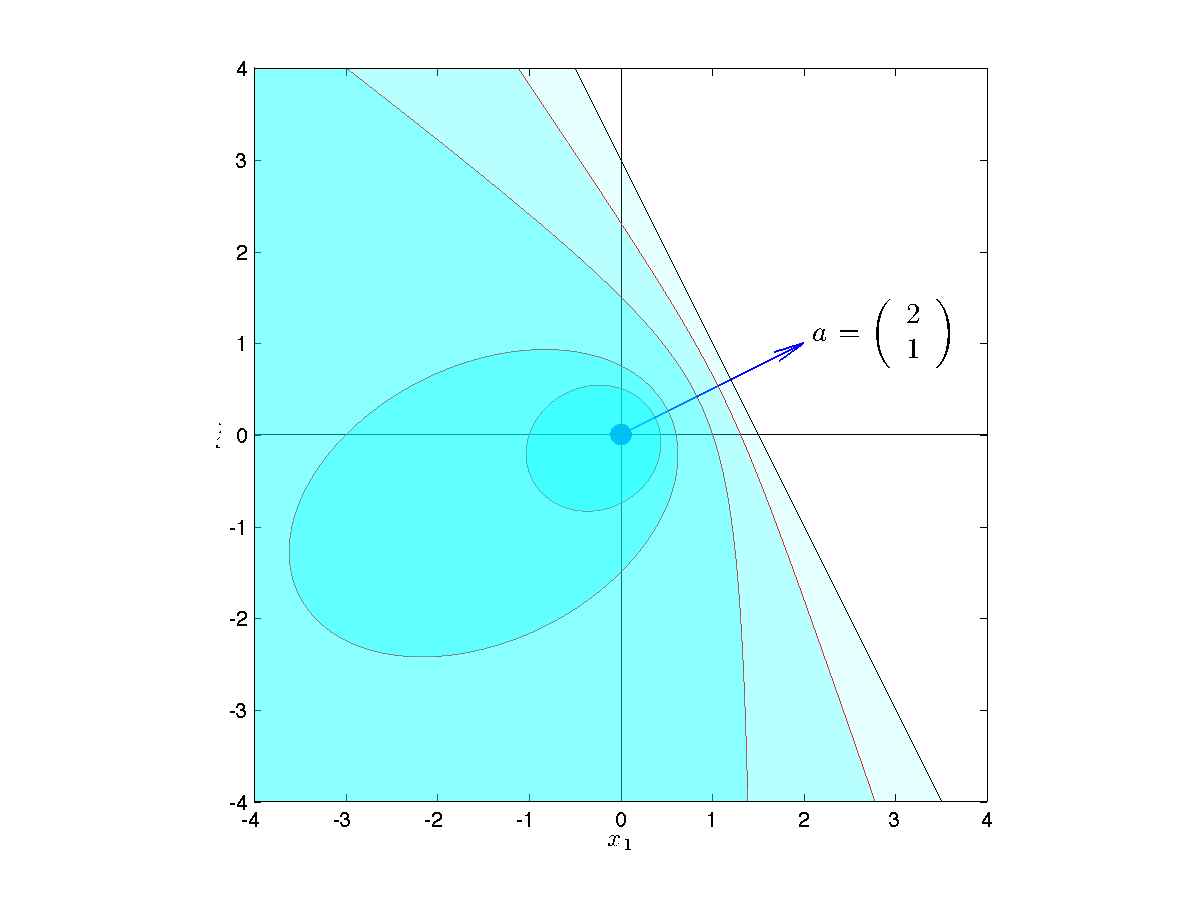 |
A robust half-space constraint with spherical uncertainty, with different uncertainty levels. |
With an ellipsoidal uncertainty model, defined as  , , the robust counterpart to the original LP:
, , the robust counterpart to the original LP:
becomes an SOCP:

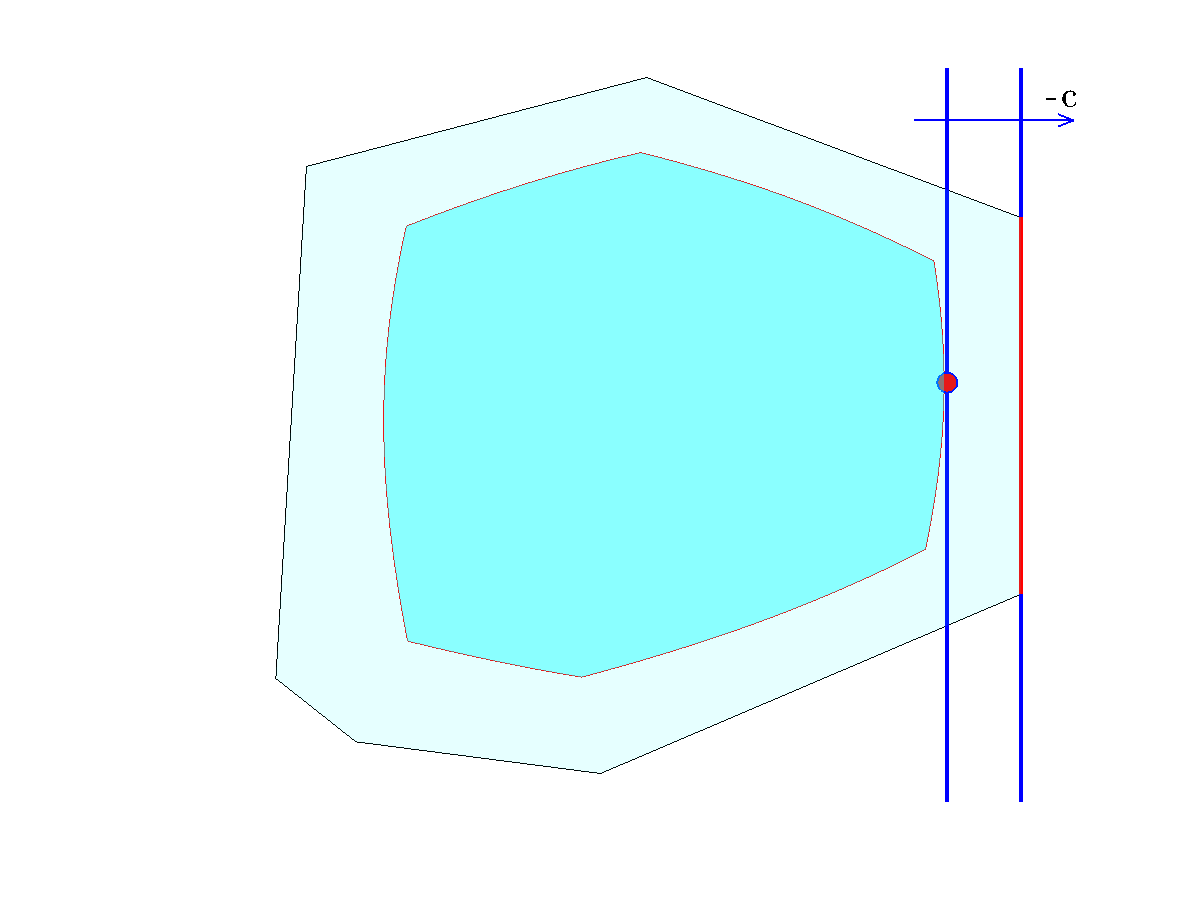 |
A robust LP with spherical uncertainty. The robust feasible set (darker blue) is inside the (polyhedral) feasible set for the nominal LP (lighter blue). The objective is to minimize |