Standard Forms of SOCP
Second-order cone
Rotated second-order cone
Second-order cone inequalities
Second-order cone
The second-order cone in  is defined as
is defined as

This set is convex, since it is the intersection of (an infinite number of) half-spaces:

It is a cone, since it is invariant by scaling: if  , so does
, so does  for any
for any  .
.
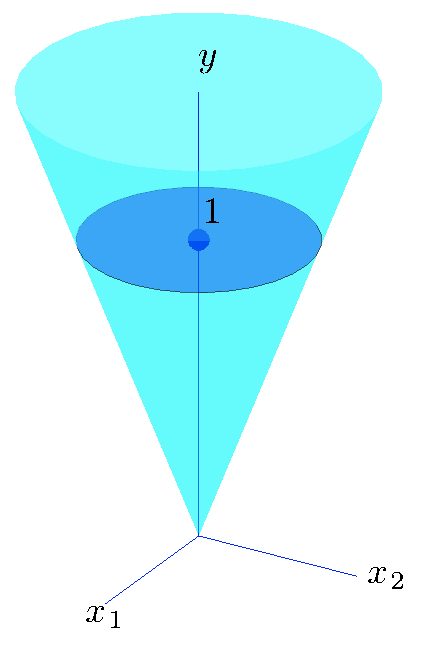 |
The second-order cone in |
 . The set actually extends to infinity upwards. For some strange reason, this set is called an ‘‘ice-cream cone’’.
. The set actually extends to infinity upwards. For some strange reason, this set is called an ‘‘ice-cream cone’’. Example: Magnitude constraints on affine complex vectors.
Rotated second-order cone
The rotated second-order cone in  is the set
is the set

Note that the rotated second-order cone in can be expressed as a linear transformation (actually, a rotation) of the (plain) second-order cone in , since

This is,  if and only if
if and only if  , where
, where  . This proves that rotated second-order cones are also convex.
. This proves that rotated second-order cones are also convex.
Rotated second-order cone constraints are useful to describe quadratic convex inequalities. Precisely, if  , the constraint
, the constraint

is equivalent to the existence of  such that
such that

where  is the square-root of the PSD matrix
is the square-root of the PSD matrix  . In the space of
. In the space of  -variables, the above constraints represent the intersection of a rotated second-order cone with affine sets.
-variables, the above constraints represent the intersection of a rotated second-order cone with affine sets.
Second-order cone inequalities
A second-order cone (SOC) inequality on a vector  states that a vector
states that a vector  that is some affine combination of
that is some affine combination of  belongs to a second-order cone.
belongs to a second-order cone.
This is a constraint of the form

where  ,
,  ,
,  , and
, and  is a scalar.
is a scalar.
Examples: