Standard Forms of SDP
A semidefinite program (SDP) is a problem of minimizing a linear function over an LMI constraint.
Standard inequality form
Standard conic form
CVX syntax
Standard Inequality Form
In standard inequality form, an SDP is written as

where  are given symmetric matrix,
are given symmetric matrix,  , and
, and  is a vector variable.
is a vector variable.
The above problem generalizes the LP in inequality form:

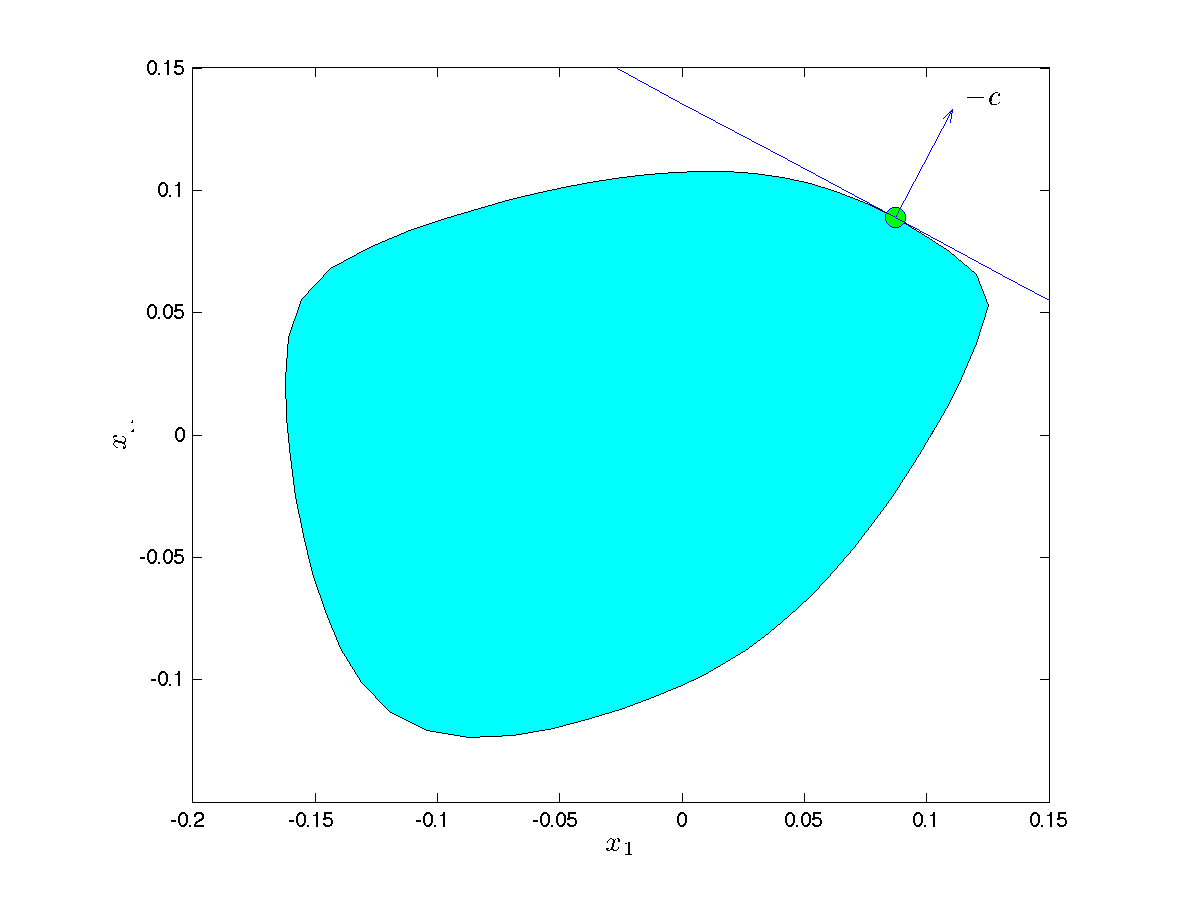 |
An SDP in two variables: 
|
 subjec to:
subjec to:  , where
, where  , and
, and  are the two
are the two  symmetric matrices
symmetric matricesStandard Conic Form
Recall that we can define the scalar product between two matrices  as
as

If  are both square, and symmetric, then the scalar product is simply the trace of the product.
are both square, and symmetric, then the scalar product is simply the trace of the product.
In standard conic form, an SDP is written as

where  and
and  are given symmetric
are given symmetric  matrices, and
matrices, and  is the matrix variable.
is the matrix variable.
The above generalizes the standard conic form for LP, which can be written as

Just as in LP, the standard inequality and standard conic forms are equivalent, in the sense that we can always convert one into the other, possibly at the expense of introducing new variables and constraints.
CVX syntax
In CVX, a constraint  , when
, when  is a symmetric matrix variable, is encoded with the semidefinite assignment. It is important to let CVX know is symmetric, when declaring it as a variable.
is a symmetric matrix variable, is encoded with the semidefinite assignment. It is important to let CVX know is symmetric, when declaring it as a variable.
cvx_begin
variables X(n,n) symmetric;
minimize( trace(C*X) )
subject to
for i = 1:m,
trace(A{i}*X == b(i);
end
X == semidefinite(n);
cvx_end