Convex Sets
Definition
Operations that preserve convexity
Separation theorems
Separating hyperplanes
Supporting hyperplanes
Definitions
A subset  of
of  is said to be convex if and only if it contains the line segment between any two points in it:
is said to be convex if and only if it contains the line segment between any two points in it:
![forall : x_1, x_2 in mathbf{C}, ;; forall : lambda in [0,1] ~:~ lambda x_1 + (1-lambda) x_2 in mathbf{C}.](eqs/2011859315932702027-130.png)
Subspaces and affine sets, such as lines, planes and higher-dimensional ‘‘flat’’ sets, are obviously convex, as they contain the entire line passing through any two points, not just the line segment. That is, there is no restriction on the scalar  anymore in the above condition.
anymore in the above condition.
Examples:
A set is said to be a convex cone if it is convex, and has the property that if  , then
, then  for every
for every  .
.
Operations that preserve convexity
Intersection
The intersection of a (possibly infinite) family of convex sets is convex. This property can be used to prove convexity for a wide variety of situations.
Examples:
Affine transformation
If a map  is affine, and is convex, then the set
is affine, and is convex, then the set

is convex.
In particular, the projection of a convex set on a subspace is convex.
Example: Projection of a convex set on a subspace.
Separation theorems
Separation theorems are one of the most important tools in convex optimization. They convex the intuitive idea that two convex sets that do not intersect can be separated by a straight line.
There are many versions of separation theorems. One of them is the separating hyperplane theorem:
If ,  are two convex subsets of that do not intersect, then there is an hyperplane that separates them, that is, there exit
are two convex subsets of that do not intersect, then there is an hyperplane that separates them, that is, there exit  ,
,  , and
, and  , such that
, such that  for every , and
for every , and  for every
for every  .
.
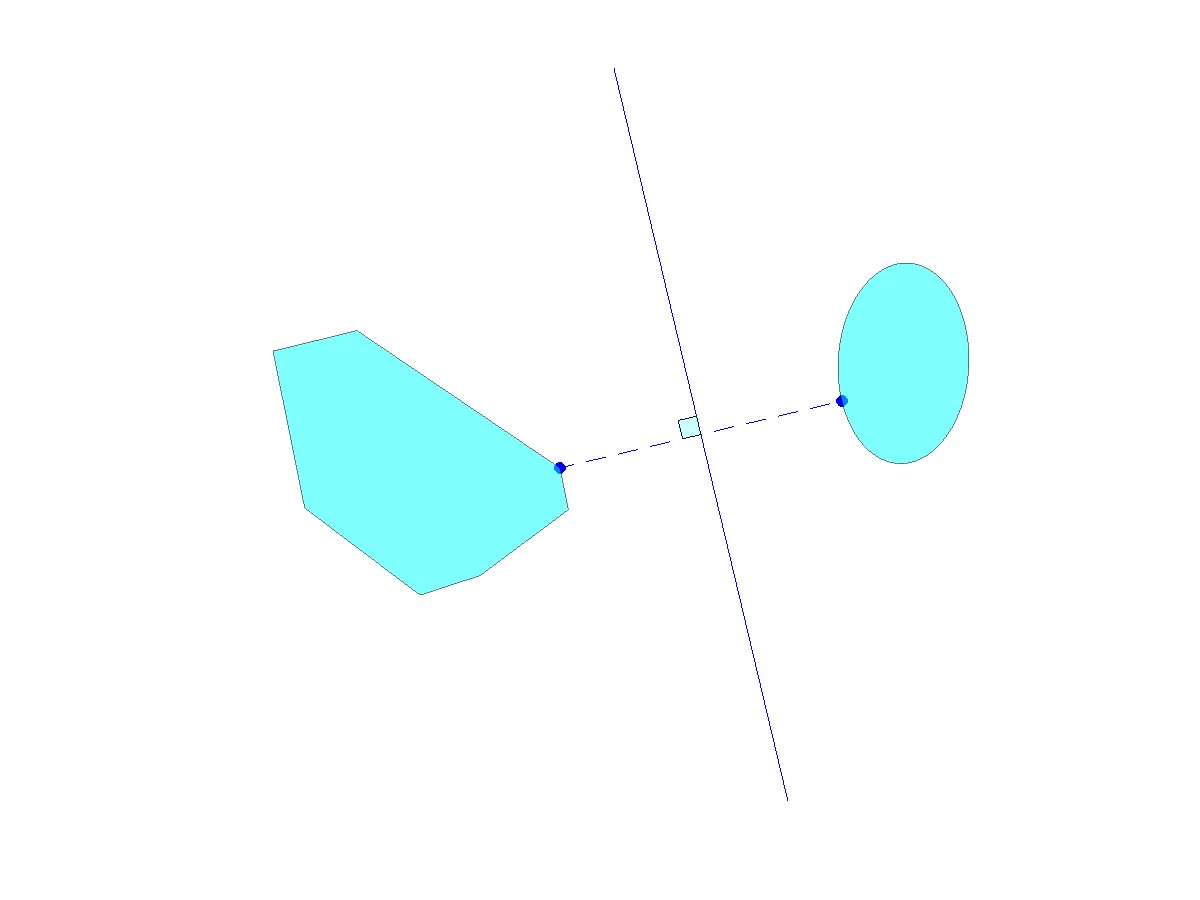 |
When two convex sets do not intersect, it is possible to find a hyperplane that separates them. In two dimensions, we can picture the hyperplane as a straight line. The proof of the separation theorem relies on finding the two points in each set that are closest to each other. |
Another result involves the separation of a set from a point on its boundary:
If  is convex and non-empty, then for any
is convex and non-empty, then for any  at the boundary of , there exist a supporting hyperplane to at , meaning that there exist , , such that
at the boundary of , there exist a supporting hyperplane to at , meaning that there exist , , such that  for every .
for every .
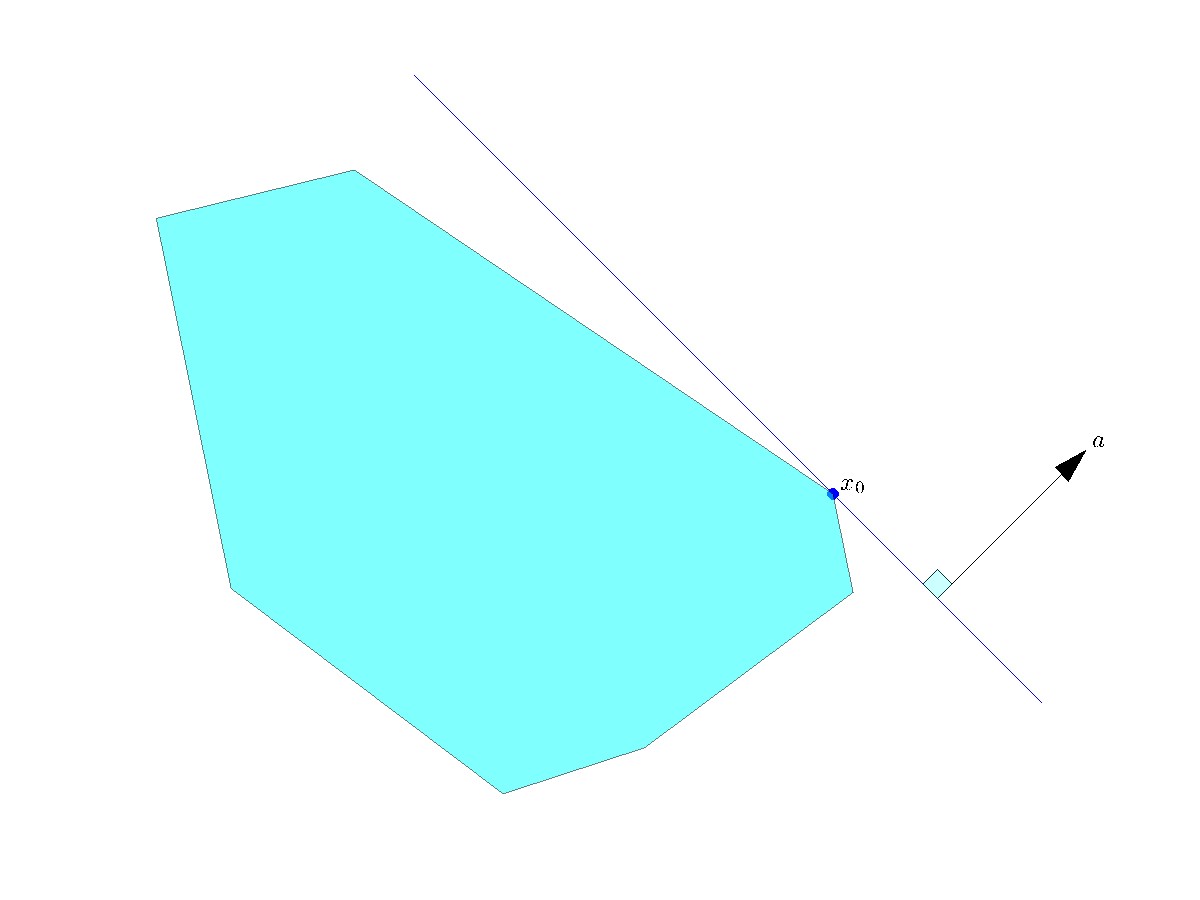 |
It is always possible to separate (not strictly) a convex set from any point |