Scalar Product, Norms and Angles
Scalar product
Norms
Three popular norms
Cauchy-schwartz inequality
Angles between vectors
Scalar product
Definition
The scalar product (or, inner product, or dot product) between two vectors  is the scalar denoted
is the scalar denoted  , and defined as
, and defined as
The motivation for our notation above will come later, when we define the matrix-matrix product. The scalar product is also sometimes denoted  , a notation which originates in physics.
, a notation which originates in physics.
In matlab, we use a notation consistent with a later definition of matrix-matrix product.
>> x = [1; 2; 3]; y = [4; 5; 6]; >> scal_prod = x'*y;
Examples:
Orthogonality
We say that two vectors are orthogonal if  .
.
Example: Two orthogonal vectors in  .
.
Norms
Definition
Measuring the size of a scalar value is unambiguous — we just take the magnitude (absolute value) of the number. However, when we deal with higher dimensions, and try to define the notion of size, or length, of a vector, we are faced with many possible choices. These choices are encapsulated in the notion of norm.
Norms are real-valued functions that satisfy a basic set of rules that a sensible notion of size should involve. You can consult the formal definition of a norm here. The norm of a vector  is usually denoted
is usually denoted  .
.
Three popular norms
In this course, we focus on the following three popular norms for a vector  :
:
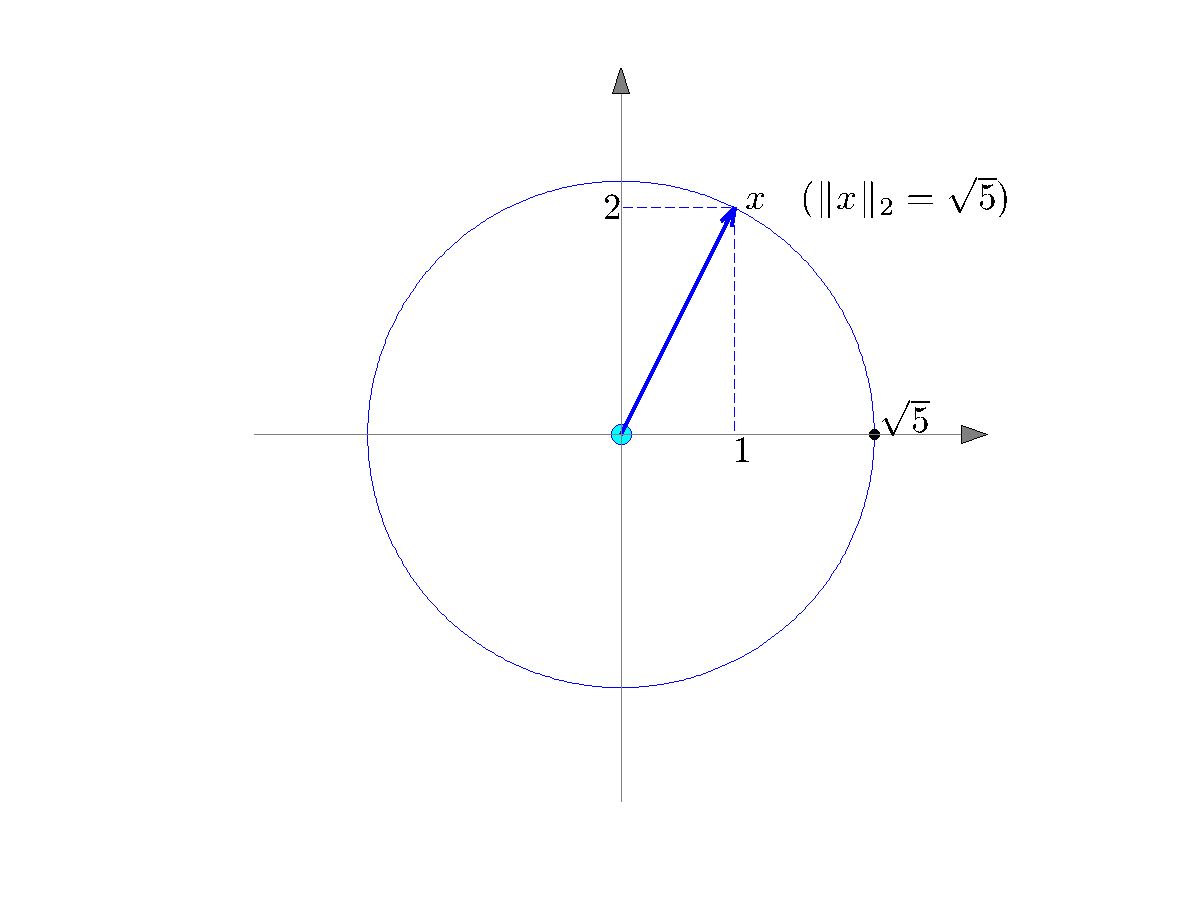 |
The Euclidean norm: 
corresponds to the usual notion of distance in two or three dimensions. The set of points with equal |
 -norm is a circle (in 2D), a sphere (in 3D), or a hyper-sphere in higher dimensions.
-norm is a circle (in 2D), a sphere (in 3D), or a hyper-sphere in higher dimensions.
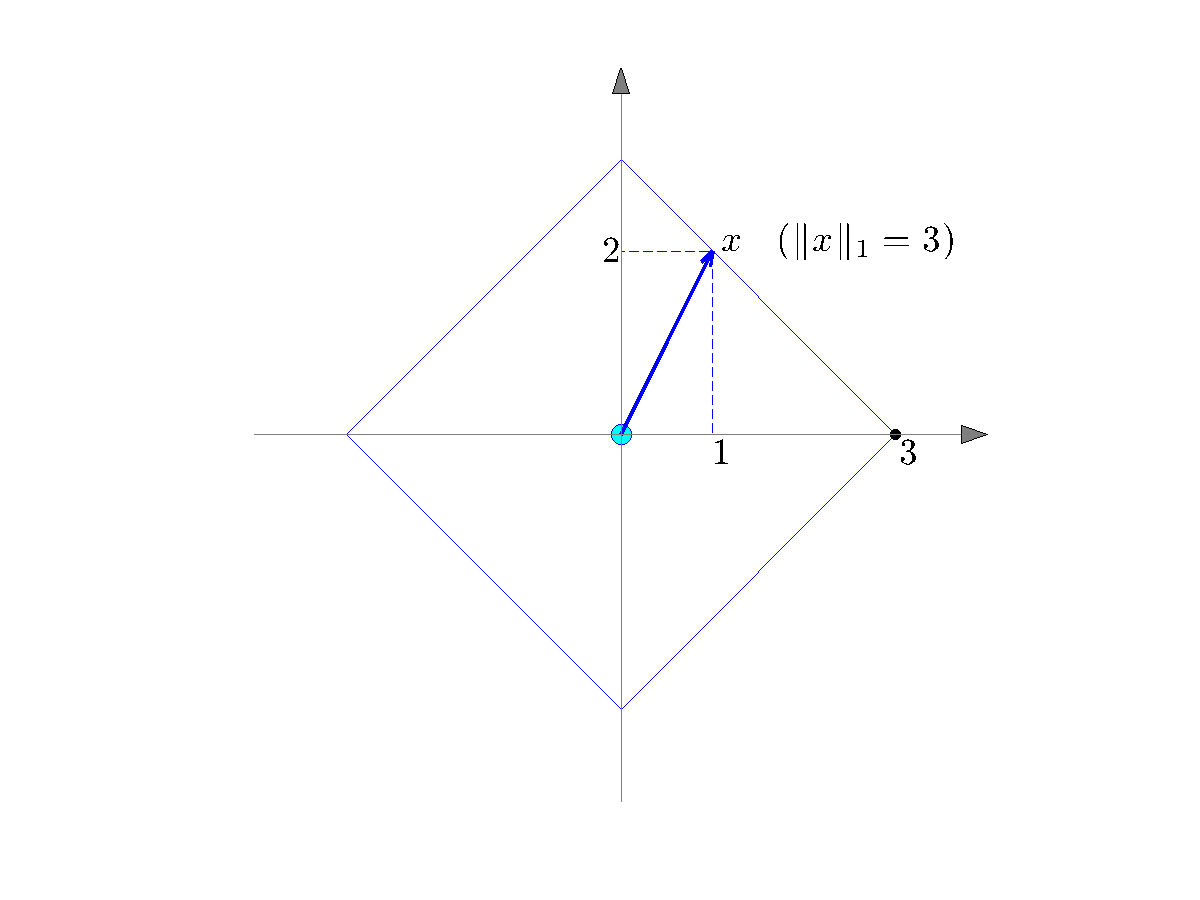 |
The 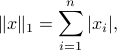
corresponds to the distance travelled on a rectangular grid to go from one point to another. |
 -norm:
-norm:
 |
The 
is useful in measuring peak values. |
 -norm:
-norm:>> x = [1; 2; -3]; >> r2 = norm(x,2); % l2-norm >> r1 = norm(x,1); % l1 norm >> rinf = norm(x,inf); % l-infty norm
Examples:
A given vector will in general have different ‘‘lengths" under different norms. For example, the vector
![x = [1,-2,3]^T](eqs/6711106360291185588-130.png) yields
yields  ,
,  , and
, and  .
.
Cauchy-Schwartz inequality
The Cauchy-Schwartz inequality allows to bound the scalar product of two vectors in terms of their Euclidean norm.
For any two vectors , we have

The above inequality is an equality if and only if  are collinear. In other words:
are collinear. In other words:

with optimal  given by
given by  if
if  is non-zero.
is non-zero.
For a proof, see here. The Cauchy-Schwartz inequality can be generalized to other norms, using the concept of dual norm.
Angles between vectors
When none of the vectors is zero, we can define the corresponding angle as  such that
such that
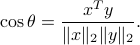
Applying the Cauchy-Schwartz inequality above to  and
and  we see that indeed the number above is in
we see that indeed the number above is in ![[-1,1]](eqs/1255166291386171885-130.png) .
.
The notion above generalizes the usual notion of angle between two directions in two dimensions, and is useful in measuring the similarity (or, closeness) between two vectors. When the two vectors are orthogonal, that is, , we do obtain that their angle is  .
.
Example: